О шуме и его влиянии на осциллографические измерения
О шуме и его влиянии на осциллографические измерения. Измерения в присутствии шума
Часть II.
Измерения в присутствии шума
Все осциллографы обладают одним недостатком — вертикальным шумом, обусловленным аналоговым и цифровым преобразованием измеряемого сигнала. Первая часть данной статьи посвящена тому, как правильно оценивать и сравнивать осциллографы по таким характеристикам вертикального шума, как среднеквадратичное значение и размах. Во второй части статьи дается ряд полезных советов по более точной оценке уровней случайных и детерминированных составляющих шума при измерении малых сигналов в условиях относительно высокого уровня собственного шума осциллографа.
Измерения в условиях шума
При проведении измерений осциллографом на наиболее чувствительных настройках коэффициента отклонения (наименьшая величина В/дел), собственный случайный шум осциллографа может замаскировать измеряемые сигналы. Однако существуют способы, позволяющие минимизировать влияние собственного шума осциллографа. Допустим, выполняется измерение уровня шума и пульсаций на выходе источника питания. В этом случае, возможно, потребуется использовать осциллограф на максимально чувствительных настройках В/дел. Для начала воспользуйтесь пробником с коэффициентом ослабления 1:1, вместо пробника 10:1, который, возможно, был поставлен вместе с осциллографом в стандартной комплектации. Использование пробника 10:1 нежелательно, поскольку в этом случае не только базовый уровень шума осциллографа возрастает в 10 раз, но также в 10 раз возрастает и минимальное значение коэффициента отклонения В/дел, по сравнению с пробником 1:1.
В случае измерений среднеквадратичного значения уровня шума источника питания, необходимо помнить, что полученная величина будет также включать в себя собственный шум осциллографа с пробником. Поскольку эта величина может быть достаточно большой, существенно возрастает погрешность измерений. Данной ситуации можно избежать, тщательно исследовав шумовые характеристики используемого осциллографа и измеряемого сигнала (источника питания). Зная эти характеристики, можно получить более точное значение уровня шума исследуемого источника питания.
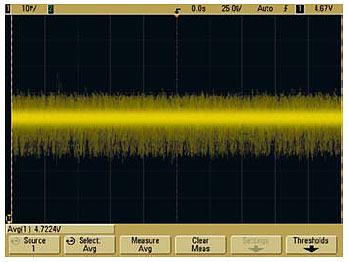
Рис. 1. Измерение шума источника питания, включая собственный шум измерительного тракта осциллограф + пробник
На рисунке 1 показаны результаты измерения шума источника питания с помощью осциллографа серии Agilent 6000. Коэффициент деления используемого пробника 1:1; коэффициент отклонения 10 мВ/дел. Для наилучшего представления сигнал смещен по напряжению на постоянную величину, равную 4,7 В (в данном случае исследуется источник питания с выходным напряжением 5 В). Обратите внимание, что не все осциллографы обеспечивают достаточный сдвиг сигнала на постоянную величину смещения (DC offset) при использовании пробников 1:1.

Рис. 2. Измерение собственного шума измерительного тракта (осциллограф + пассивный пробник 1:1)
Таким образом, согласно результатам измерений с использованием пробника 1:1 среднеквадратичное значение уровня шума исследуемого пятивольтового источника питания равно 1,5 мВ. На рис. 2 представлены результаты измерений уровня собственного шума измерительного тракта осциллографа при использовании пассивного пробника 1:1. Для проведения этого измерения заземляющая клемма пробника подсоединялась к измерительному концу пробника. В результате, уровень собственного шума измерительного тракта составил приблизительно 480 мкВ при коэффициенте отклонения 10 мВ/дел (о подробностях измерения характеристик собственного шума осциллографа см. часть I данной статьи). Теперь, исходя из определения среднеквадратичного значения величины (корень из суммы квадратов компонентов), можно определить точное значение уровня собственного шума источника питания. Оно составило около 1.4 мВ.
Важно отметить, что результат измерений сигнала источника питания помимо случайной компоненты может иметь детерминированную составляющую. Если детерминированная составляющая не имеет определенного корреляции с частотой синхронизации осциллографа, использование вышеописанного метода исключения собственного шума из результатов измерений дает очень хороший результат.
Отдельные детерминированные (систематические) составляющие измеряемого сигнала, например, составляющие на частотах переключения силовых ключей источника питания и цифрового тактового сигнала, также могут быть учтены при оценке результатов измерений, даже при наличии значительной случайной составляющей собственного шума осциллографа. Путем задействования дополнительных каналов осциллографа для синхронизации по подозрительным сигналам, пользователь может выполнить многократный сбор данных и усреднение сигнала. При этом отфильтровываются все случайные и некоррелированные составляющие шума, вызванные как осциллографом с пробником, так и измеряемым сигналом. В результате пользователь сможет провести измерения определенной составляющей шума источника питания с высоким разрешением, даже в случае использования наиболее чувствительных настроек В/дел, таких как 2 мВ/дел (см. рис. 3).
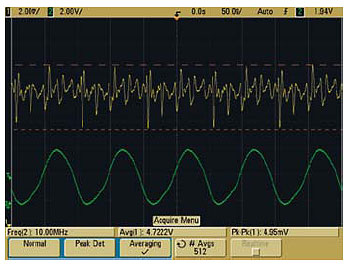
Рис. 3. Измерение величины размаха шума, обусловленного сигналом тактовой частоты
Используя описанную технику измерений, было получено значение размаха детерминированной составляющей, равное 4,9 мВ, обусловленной сигналом тактовой частоты цифровой системы управления источника питания (сигнал зеленого цвета внизу на рис. 3). Для поиска других детерминированных составляющих шума, необходимо провести ряд измерений по описанной методике с синхронизацией на предполагаемых сигналах источников помех.
Эффект «утолщения» формы сигналов на экране осциллографа
Существует распространенное заблуждение о том, что цифровые осциллографы имеют больший уровень случайного вертикального шума, чем их аналоговые собратья. Это заблуждение основано на том, что сигналы на экране цифрового осциллографа отображаются обычно толще, чем на экране аналогового. На самом деле, при одинаковой полосе пропускания уровень шума цифрового осциллографа не выше, чем у аналогового. Вертикальный шум на экране аналогового осциллографа либо слабоконтрастный, либо вообще отсутствует, в силу случайной природы. Хотя инженеры часто воспринимают осциллограф как прибор для отображения сигналов в двух измерениях — напряжении и времени — аналоговые осциллографы в силу особенностей электронно-лучевой технологии позволяют отображать сигнал в третьем измерении. В этом измерении осциллограф отображает частоту повторения сигнала посредством модуляции яркости (интенсивности) сигналов, что в результате приводит к визуальному подавлению или «скрытию» выбросов случайного вертикального шума.
Обычные цифровые осциллографы не обладают свойством отображать сигналы в третьем измерении (с градацией яркости). Тем не менее, некоторые современные модели уже позволяют модулировать яркость сигналов, тем самым, достигая качества изображения, свойственного аналоговым осциллографам. В частности, осциллографы новой серии Agilent 6000 с архитектурой MegaZoom III обладают наилучшими в отрасли возможностями по вариации яркости (интенсивности) сигналов с помощью 256 уровней градации яркости осциллограмм, отображаемых на дисплее с XGA разрешением.
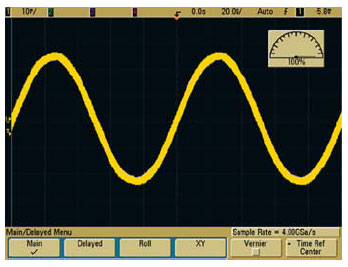
Рис. 4. Отображение сигналов на экране без градации яркости
На рис. 4 представлен сигнал малой амплитуды с частотой 10 МГц, захваченный при коэффициенте отклонения 10 мВ/дел и отображенный со 100% яркостью. Эта картинка является типичной для устаревших моделей цифровых осциллографов, не имеющих функции градации яркости сигналов. Не имея возможности отображать сигнал с вариацией яркости, сигнал отображается «жирным», что позволяет выявить максимальные случайные выбросы шума сигнала. Однако «толщина» этого сигнала (примерно 50 мВ в размахе), измеренная при коэффициенте отклонения 10 мВ/дел связана, в основном, с собственным шумом осциллографа, а не шумом входного сигнала. На рис. 5 представлен тот же 10 МГц сигнал при отображении на 20%-м уровне яркости для более точной имитации дисплея аналогового осциллографа, который естественным образом визуально подавляет случайные выбросы шума. Теперь можно наблюдать более «четкий» сигнал без признаков собственного шума осциллографа на сравнительно чувствительных настройках В/дел. Кроме того, на рис. 5 видно, что подавление собственных помех позволяет увидеть ранее неразличимые особенности измеряемого сигнала такие, как небольшие пульсации вблизи максимума амплитуды.
Рис. 5. Отображение сигналов на экране с градацией яркости
Другим вариантом учета собственного шума измерительного тракта является повторное измерение сигнала с последующим усреднением, как показано на рис. 3. В тех случаях, когда данный вариант невозможен (измерения в реальном времени и многократные измерения), существует вариант использования режима высокого разрешения (если это позволяет используемый осциллограф). Оцифровка в режиме высокого разрешения может быть использована для однократных измерений, позволяя отфильтровывать высокочастотные шумовые и детерминированные компоненты сигнала посредством цифровых фильтров. Вертикальное разрешение может быть повышено до 12 бит, но при этом сокращается полоса пропускания измерительного тракта.
При использовании осциллографа на наиболее чувствительных настройках коэффициента отклонения, относительный уровень собственного шума осциллографа может быть достаточно высоким, тем самым снижая точность измерений сигналов с малой амплитудой. Во второй части статьи, рассматривающей характеристики собственного шума осциллографа и их влияние на результаты измерений, были показаны методы учета собственного шума осциллографа при измерении среднеквадратичного значения уровня шумов источника питания. Кроме этого, был представлен метод усреднения сигнала, позволяющий исключить случайные компоненты шума для точного измерения детерминированных составляющих шума.
Часть I. Оценка вертикального шума осциллографа. смотреть.
Джонни Хенкок (Johnnie Hancock), Agilent Technologies
О шуме и его влиянии на осциллографические измерения. Оценка вертикального шума осциллографа
Все осциллографы обладают одним недостатком — вертикальным шумом, обусловленным аналоговым и цифровым преобразованием измеряемого сигнала. Наличие вертикального шума снижает точность измерений, особенно сигналов с малой амплитудой и шумов. Любой осциллограф имеет определенную полосу пропускания измеряемого сигнала. Как правило, чем шире полоса пропускания осциллографа, тем больше вертикальный шум. Достаточно часто при выборе осциллографа вертикальному шуму не уделяется достаточного внимания. Это неправильно, поскольку вертикальный шум оказывает влияние сразу на несколько характеристик измеряемого сигнала.
Так, следствиями наличия вертикального шума являются:
• ошибка амплитудных измерений сигнала;
• неопределенность при воссоздании сигнала с помощью функции sin(x)/x;
• ошибка по времени (джиттер), зависящая от скорости нарастания (крутизны фронта) измеряемого сигнала;
• видимое утолщение сигналов, отображаемых на экране осциллографа.
К сожалению, не все производители предоставляют потребителю информацию о величине вертикального шума в технических характеристиках осциллографа. И даже тогда, когда производители это делают, указываемые характеристики вертикального шума часто являются неполными и трудно интерпретируемыми. Первая часть данной статьи посвящена тому, как правильно оценивать и сравнивать осциллографы по характеристикам вертикального шума. Во второй части статьи даны рекомендации по более точной оценке уровней случайных и детерминированных составляющих шума при измерении малых сигналов в условиях относительно высокого уровня собственного шума осциллографа.
Собственный шум осциллографа и его измерение
Случайный шум, иногда называемый белым шумом, теоретически не имеет ограничений по времени и подчиняется распределению Гаусса. Поскольку случайный шум не ограничен во времени, то чем больше выборка данных при измерении сигнала, тем больше размах шума. В связи с этим, такие случайные явления, как вертикальный шум и джиттер должны характеризоваться среднеквадратичным (RMS, эфф) значением (стандартным отклонением).
У осциллографов уровень шума при наиболее чувствительной настройке коэффициента отклонения (наименьшая величина В/дел) принято называть «базовым уровнем шума» («base-line noise floor»). Необходимо отметить, что ряд моделей осциллографов имеют аппаратно ограниченную полосу пропускания при наиболее чувствительной настройке коэффициента отклонения.
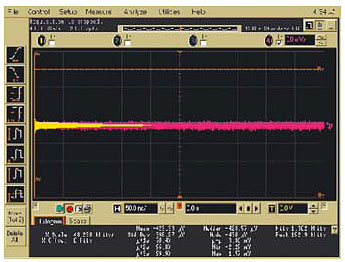
Рис. 1. Построение гистограммы шума осциллографа
Поскольку осциллограф измеряет сигнал в широкой полосе частот, то, как правило, чем шире полоса пропускания, тем выше базовый уровень шума. Таким образом, для корректного сравнения по базовому уровню шума осциллографы должны иметь одинаковую полосу пропускания. Имея осциллографы с одинаковым предельным значением полосы пропускания, сравнение необходимо выполнять при наиболее чувствительной настройке коэффициента отклонения, обеспечивающей всю полосу пропускания.
Ошибочным является мнение о том, что значение базового уровня шума, полученное при наиболее чувствительной настройке В/дел, остается одинаковым для всех значений коэффициента отклонения. Собственный шум осциллографа является комбинацией двух составляющих. Одна составляющая шума имеет фиксированное значение и обусловлена работой аттенюатора и усилителя во входном тракте осциллографа. Базовый уровень шума при наиболее чувствительной настройке коэффициента отклонения дает хорошую аппроксимацию этой составляющей шума. Данная составляющая является доминирующей на большинстве наиболее чувствительных настроек, но практически не оказывает влияния в случае наименее чувствительных настроек (наибольшие значения В/дел).
Второй составляющей является относительный уровень шума, который зависит от динамического диапазона осциллографа, определяемого конкретным значением настройки В/дел. В наиболее чувствительном режиме, данной составляющей можно пренебречь. Однако она является основной в наименее чувствительном режиме. Несмотря на то, что при больших значениях В/дел визуально уровень шума может казаться меньше, фактическая амплитуда шума может быть значительной.
Измерение среднеквадратичного уровня собственного шума осциллографа осуществляется достаточно просто. Многие из современных высокопроизводительных осциллографов на базе операционной системы Windows имеют функцию построения гистограммы измеряемого сигнала (рис. 1). Если тестируемый осциллограф имеет такую функцию, то для построения гистограммы необходимо установить такой коэффициент развертки, чтобы при максимальной частоте дискретизации объем памяти составлял не менее 10 квыб. Для определения правильного коэффициента развертки, при котором глубина памяти составляет 10 квыб, используется следующая формула:
коэффициент развертки (с/дел) = 10 000 (выб.) / макс. частота дискретизации (выб./с) / 10 (дел.)
Затем, необходимо включить функцию построения вертикальной гистограммы и расположить маркеры гистограммы так, чтобы они охватывали весь экран. Затем в режиме автоматической синхронизации необходимо провести непрерывные измерения в течение нескольких секунд. Поскольку в данном случае измеряется стандартное отклонение, количество измеряемых данных не критично. Однако в случае измерения величины шума в размахе, как будет показано позже, количество измеряемых данных является важным фактором. Среднеквадратичное значение шума для каждого значения коэффициента отклонения будет равно накопленному/среднему значению стандартного отклонения гистограммы и представлено в области отображения результатов измерений в нижней части экрана осциллографа (рис. 1).
Если тестируемые осциллографы не имеют функцию построения гистограммы, можно воспользоваться альтернативным методом определения среднеквадратичного значения уровня шума.
Для этого необходимо сохранить сигналы на дискету или USB-накопитель в формате *.CSV (текстовом формате с разделяющей запятой), а затем открыть сохраненный файл с помощью стандартного табличного редактора Microsoft Excel. Далее, используя встроенную функцию расчета стандартного отклонения в Excel, произвести расчет для всего диапазона данных.
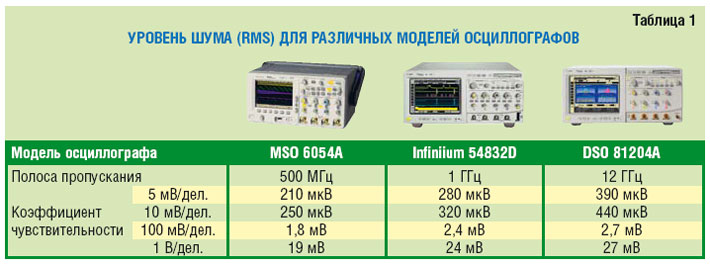
В табл. 1 представлены среднеквадратичные значения уровня шума для трех моделей осциллографов компании Agilent Technologies, которые имеют верхний предел полосы пропускания 500 МГц, 1 ГГц и 12 ГГц. Для измерения уровней шума была использована комбинация двух вышеприведенных методов. При измерении использовалась максимальная частота дискретизации, источник входного сигнала отсутствовал, а вход осциллографа «закорачивался» на сопротивление 50 Ом. Из таблицы видно, что чем шире полоса пропускания осциллографа, тем выше уровень шума для любого значения коэффициента отклонения. Таким образом, для измерения сигналов с малой амплитудой и когда не требуется широкая полоса пропускания, лучшим решением может оказаться осциллограф с более узкой полосой пропускания.
Измерение величины шума в размахе
Несмотря на то, что для получения наилучших результатов следует проводить сравнение уровня шума осциллографов по их среднеквадратичному значению, достаточно часто возникает желание провести сравнение и по величине размаха шума. В конечном счете, именно максимальные выбросы шума наблюдаются пользователем на экране осциллографа и становятся причиной увеличенной погрешности амплитудных измерений в режиме реального времени без усреднения сигнала. По этой причине многие пользователи предпочитают измерять и сравнивать именно величину размаха шума.
На первый взгляд, может оказаться заманчивым выставить на каждом осциллографе одинаковые значения коэффициента развертки для проведения измерений в режиме бесконечного послесвечения в течение определенного периода времени, например, 10 секунд. Однако, несмотря на кажущуюся интуитивность этого подхода, не рекомендуется использовать его для измерения величины размаха шума. Дело в том, что при одинаковом коэффициенте развертки осциллографы могут не только иметь разную глубину памяти, но и значительно отличаться по частоте обновления экрана. В этом случае осциллографы с более высокой частотой обновления экрана и, возможно, более глубокой памятью смогут собрать значительно больше данных, чем осциллографы с медленной частотой обновления экрана и неглубокой памятью. А, как уже упоминалось ранее, чем больше данных собирает осциллограф, тем больше становится величина размаха шума, вследствие случайной природы шума с гауссовым распределением.
В связи с этим, вначале имеет смысл задать ограничение на количество собираемых данных, как критерий при проведении измерения величины размаха шума. В дальнейшем, результаты измерений размаха шума будут оцениваться в соответствии с этим критерием. Если сравниваются осциллографы с разной глубиной памяти, то необходимо в качестве критерия взять наименьшую глубину памяти.
Для определения подходящего коэффициента развертки для измерения величины размаха шума с учетом определенной глубины памяти используется следующая формула:
коэффициент развертки (с/дел) = объем памяти (выб.) / макс. частота дискретизации (выб./с) / 10 (дел.)
Некоторые осциллографы способны автоматически установить максимальные значения частоты дискретизации и глубины памяти для каждого коэффициента развертки. Но в некоторых приборах, наоборот, введено ограничение глубины памяти и частоты дискретизации на некоторых коэффициентах развертки для того, чтобы повысить частоту обновления экрана. Поэтому может потребоваться откорректировать результаты автоматической настройки параметров и вручную установить такие значения максимальной частоты дискретизации и глубины памяти, которые были бы равны или больше величины критерия, установленного для измерения величины размаха шума.
После того, как все настройки осциллографа (частота дискретизации, глубина памяти, коэффициент развертки) выполнены должным образом, возможны два варианта измерения величины размаха шума: с помощью гистограммы или с помощью автоматической функции измерения величины размаха сигнала для каждого коэффициента отклонения. Поскольку размах шума есть величина случайная, необходимо провести несколько измерений для получения среднего (типичного) значения размаха шума при заданной глубине памяти.

В табл. 2 представлены типичные значения величины размаха шума для тех же трех моделей осциллографов Agilent. Значения шума были получены при глубине памяти 1 Мвыб. Для получения типичных значений величины размаха шума проводилось усреднение результатов по десяти повторным измерениям для каждого коэффициента отклонения.
Измерение шума с помощью осциллографических пробников
Большинство осциллографов поставляются в стандартной комплектации с пассивными пробниками с коэффициентом деления 10:1, которые обеспечивают системную полосу пропускания до 600 МГц (для осциллографов с полосой пропускания 600 МГц и выше). Для измерения более высокочастотных сигналов при более широкой полосе пропускания осциллографа используются активные пробники. Независимо от того, используется ли пассивный или активный тип пробника, он вносит свой вклад в общий уровень случайного шума. Современные цифровые осциллографы могут автоматически распознать коэффициент деления пробника и скорректировать коэффициент отклонения осциллографа с учетом ослабления, вносимого пробником. Так, например, если используется пробник 10:1, то на экране осциллографа высветится значение коэффициента отклонения в 10 раз большее, чем фактически установленное. Другими словами, если на осциллографе установлен коэффициент отклонения 20 мВ/дел. и используется пробник 10:1, то входной усилитель и делитель осциллографа будут настроены на 2 мВ/дел.
Это означает, что на экране осциллографа будет отображаться достаточно высокий уровень шума, поскольку базовый уровень шума увеличен в десять раз. Кроме того, следует иметь в виду, что если в осциллографе используется аппаратное ограничение полосы пропускания для наиболее чувствительных коэффициентов отклонения, то в этом случае ограничение полосы пропускания может распространяться и на более высокие значения коэффициентов отклонения с учетом коэффициента деления пробника.
Если необходимо провести измерения сигналов с очень малой амплитудой, например, измерение пульсаций на выходе источника питания, то лучше воспользоваться пассивным пробником с коэффициентом деления 1:1. Использование подобного пробника позволит провести измерения на самых чувствительных установках коэффициента отклонения без увеличения уровня шумов или ограничения полосы пропускания.
При выборе осциллографа необходимо принимать во внимание параметры его собственного шума. Не все осциллографы имеют одинаковые технические характеристики. Уровень собственного шума осциллографа может не только существенно снизить точность измерений сигнала, но и значительно ухудшить качество отображения оцифрованного сигнала на экране. Оценивая характеристики собственного шума осциллографов, необходимо проводить их сравнение при одинаковых значениях ряда параметров, таких как полоса пропускания, коэффициент отклонения (при максимальной полосе пропускания), частота дискретизации, глубина памяти и количество циклов сбора данных.
Во второй части данной статьи будут рассмотрены методы более точного измерения сигналов с малой амплитудой с учетом собственного шума осциллографа.
Часть II. (продолжение) Измерения в присутствии шума. смотреть.
Джонни Хенкок (Johnnie Hancock), Agilent Technologies
Измерение шумов источника питания с помощью осциллографа


Современные полупроводниковые приборы отличаются высокой скоростью переключения, большей крутизной фронтов, большим числом активных выводов и малым размахом сигнала. В этой связи статья рассматривает измерение шумов источника питания с помощью осциллографа.
Современные полупроводниковые приборы отличаются высокой скоростью переключения, большей крутизной фронтов, большим числом активных выводов и малым размахом сигнала.

Введение
Повышение скорости переключения, крутизны фронтов и увеличение числа активных выводов корпуса приводит к увеличению наведенного коммутационного шума в источниках питания. В то же время повышается восприимчивость схем к шумам источника питания, поскольку снижение амплитуды сигнала приводит к сужению границ допустимых значений шума.
В результате конструкторы всех устройств — от сотовых телефонов до серверов — все больше уделяют внимание шумам источника питания. Как правило, для измерения шумов источников питания используются осциллографы реального времени, что связано с широкополосным характером этих шумов. В этой статье обсуждаются шумы источников питания и их измерение с помощью осциллографа Agilent серии Infiniium 8000.
«Шум»
В идеальном случае источник питания шуметь не должен, так почему же он шумит? Простой гауссовский шум, неизбежно порождаемый тепловыми процессами, в данном случае не является доминирующим. Главным источником шумов в большинстве цифровых схем являются процессы коммутации.
Импульсные источники питания порождают собственные шумы — как правило, на частотах, кратных рабочей частоте преобразователя. Кроме того, в момент переключения логических схем и формирователей импульсного сигнала возникают переходные токи, оказывающие дополнительную нагрузку на источник питания. Хотя такие переключения могут происходить в случайные моменты времени, они так или иначе привязаны к тактовой частоте системы. Поэтому их следует считать не столько «шумами», сколько «сигналами», накладывающимися на постоянное напряжение источника питания (рис. 1). Такой подход к рассмотрению шума значительно упрощает его анализ.

Проблемы, возникающие при измерении
Широкополосная природа шумов источника питания вынуждает исследователей использовать для его измерения осциллографы. Осциллографы дают уникальную возможность взглянуть на природу возникновения шума. Но, к сожалению, широкополосные цифровые осциллографы реального времени и осциллографические щупы обладают собственными шумами, которые следует учитывать. Если измеряемый уровень шума источника питания имеет тот же порядок, что и собственные шумы осциллографа и щупа, точное измерение шума сильно затрудняется.
Другую проблему представляет динамический диапазон. Сигнал источника питания привязан к постоянному напряжению. Небольшое переменное напряжение шума, наложенное на это постоянное напряжение, составляет обычно лишь очень малую его часть. Для многих осциллографов и щупов такое постоянное смещение может оказаться проблематичным, особенно при измерении с большой чувствительностью (для оптимального отображения шума при минимальном уровне шумов осциллографа).
Методы и передовой опыт измерений
Существует множество методов, позволяющих улучшить эффективность измерения шумов источника питания.
Оценка шумового вклада осциллографа и щупа
Очевидно, что для достижения максимальной точности измерения осциллограф и щуп должны обладать достаточно низким уровнем собственных шумов.
Природа собственных шумов осциллографа поясняется блок-схемой на рис. 2. В системе «щуп–осциллограф» присутствует два основных источника шума. С одной стороны, некоторый шум вносят входной усилитель и буферные схемы осциллографа, а с другой — обладает шумами усилитель щупа. Все осциллографы используют аттенюатор для установки вертикального размаха сигнала. Из-за этого аттенюатора шум осциллографа возрастает. Поэтому если аттенюатор установлен на любое значение, кроме 1:1 (соответствующее максимальной чувствительности осциллографа), отображаемый шум, приведенный к входному разъему осциллографа, будет расти. Например, возьмем осциллограф с собственной чувствительностью без аттенюатора 5 мВ/дел. Предположим, что при такой чувствительности он имеет собственный уровень шумов 500 мкВ (среднеквадратическое).

Чтобы снизить чувствительность до 50 мВ/дел., последовательно с входом осциллографа включается аттенюатор 10:1. При этом значение отображаемого шума, приведенное ко входу аттенюатора, будет равно 5 мВ среднеквадратического значения (500 мкВ умножить на 10). Поэтому, во избежание нежелательного «усиления» собственных шумов осциллографа, нужно использовать диапазон с наибольшей чувствительностью. Шум, создаваемый щупом, попадает в систему до входного аттенюатора осциллографа, поэтому его вклад не зависит от коэффициента ослабления.
Всегда используйте дифференциальный щуп
В большинстве случаев шум щупа значительно превосходит шум осциллографа при максимальной чувствительности. Большинство источников питания без проблем выдерживают нагрузку 50 Ом входа осциллографа, так зачем же добавлять еще и шум щупа? Ответ кроется в динамическом диапазоне.
Чтобы сигнал оказался в центре экрана и в середине рабочей характеристики АЦП осциллографа при измерении шума источника питания напряжением 1,5 В, осциллограф должен обеспечить работу при смещении 1,5 В. Наиболее чувствительный диапазон, в котором осциллограф позволяет подать на вход смещение 1,5 В, равен 100 мВ/дел. В диапазоне 100 мВ/дел. шум осциллографа составляет ~3 мВ (среднеквадратическое). К тому же в диапазоне 100 мВ/дел. измеряемый шум будет использовать лишь малую часть рабочей характеристики АЦП, что приведет к потере разрешения.
Если сам осциллограф способен работать с необходимым смещением лишь при минимальной чувствительности, ситуацию могут исправить возможности щупа. Используя активные щупы, работающие с большим уровнем смещения, можно достичь большей точности измерения и снизить влияние собственных шумов осциллографа. Активный дифференциальный щуп обеспечивает смещение сигнала на 1,5 В, позволяя тем самым использовать для измерения более чувствительный диапазон 10 мВ/дел. и получать более точные результаты.
Для решения проблемы динамического диапазона можно использовать также вход со связью по переменному току (если осциллограф это допускает). Если осциллограф имеет входное сопротивление 50 Ом, и инженер хочет использовать коаксиальный кабель с волновым сопротивлением 50 Ом и щуп с коэффициентом передачи 1:1, то для подключения сигнала по переменному току можно использовать включенный последовательно со входом разделительный конденсатор. Разделительный конденсатор должен обеспечивать измерение минимальной частоты шумового спектра. Недостатком подключения по переменному току является то, что оно не позволяет наблюдать медленный дрейф напряжения источника питания.
Анализ с помощью быстрого преобразования Фурье
Большинство цифровых осциллографов реального времени имеют функцию быстрого преобразования Фурье (FFT). После каждого запуска осциллограф может обработать конечный фрагмент сигнала, длительность которого определяется объемом памяти и частотой дискретизации осциллографа. Разрешение сигнала в частотной области, которое получается с помощью FFT, определяется уравнением:

Чтобы увидеть в FFT предполагаемый источник шума, объем памяти должен быть достаточно большим для захвата достаточного числа отсчетов. Например, если импульсный источник питания работает на частоте 33 кГц, нужно захватить сигнал длительностью 1/(33 кГц), то есть 30 мкс. При частоте дискретизации 20 × 10 9 отсчетов/с это эквивалентно 600 000 ячеек памяти.
В цифровых запоминающих осциллографах серии 8000 и осциллографах серии DSO 80 000 компании Agilent функция FFT работает только с данными, видимыми на экране. Чтобы увидеть минимальные частоты для выбранного объема памяти и частоты дискретизации, скорость развертки надо установить так, чтобы вся память оказалась на экране. Это очень легко определить по расположенному над шкалой индикатору памяти.
Анализ FFT позволяет глубже исследовать свойства сигнала. Он обеспечивает быстрый анализ источников шума. Например, если устройство содержит блок питания с частотой преобразования 33 кГц и тактовый генератор 500 МГц, пики наблюдаются на частоте 33 кГц и на частотах, кратных 500 МГц. Относительная амплитуда этих пиков позволяет в первом приближении оценить вносимый ими уровень шума.
На рис. 3 показаны результаты анализа FFT, где кроме белого шума видны еще две составляющие. Одна из них лежит на частоте 49,5 МГц, а другая — на частоте 500 МГц.

Другой способ повышения заметности пиков заключается в усреднении FFT. Истинно случайный шум существенно подавляется при усреднении FFT, что позволяет выделять из шума очень слабые сигналы.
Синхронизация с предполагаемыми источниками и применение усреднения для подавления некоррелированного шума
В некоторых случаях удается засинхронизироваться с сигналом, совпадающим по фазе с источником неслучайного шума, и затем использовать усреднение. Усреднение позволяет уменьшить или подавить все компоненты, не коррелирующие с синхросигналом. Таким образом можно выделять компоненты сигнала, которые в противном случае маскировались бы случайным шумом самого источника питания или осциллографа и щупа.
На рис. 4 показан пример синхронизации от сигнала прямоугольной формы. Сигнал прямоугольной формы может представлять, например, шум коммутации, возникающий на выходах мощных каскадов или в результате других переходных процессов в цепи нагрузки. Шумовые составляющие, относящиеся к сигналу синхронизации, хорошо видны на фоне других шумов.

Заключение
Измерение шумов источников питания порождает определенные проблемы. Благодаря присущей ему широкой полосе, оптимальным прибором для таких измерений является осциллограф. В этой статье перечислены некоторые методы, которые можно использовать для таких измерений. При условии правильного выбора осциллографа и щупа эти методы позволяют эффективно измерять шум источников питания.
Литература
- Суть и применение смещения в активных щупах InfiniiMax. Указания по применению 5988-9264EN.
- Сравнение параметров дифференциальных и несимметричных активных датчиков напряжения. Указания по применению 5988-8006EN.
- www.agilent.com/find/scopes
Высокоэффективный анализ джиттера тактовых генераторов в высокоскоростных цифровых устройствах
С увеличением скорости передачи данных в высокопроизводительных цифровых устройствах ограничения по величине джиттера становятся все более жесткими. Это в первую очередь относится к различным компонентам дерева тактирования, где действуют еще более жесткие ограничения по джиттеру для опорных тактовых генераторов, буферов тактовых генераторов и аттенюаторов джиттера. Благодаря высокой чувствительности к фазовому шуму анализаторы фазового шума считаются лучшими приборами для проведения таких испытаний.

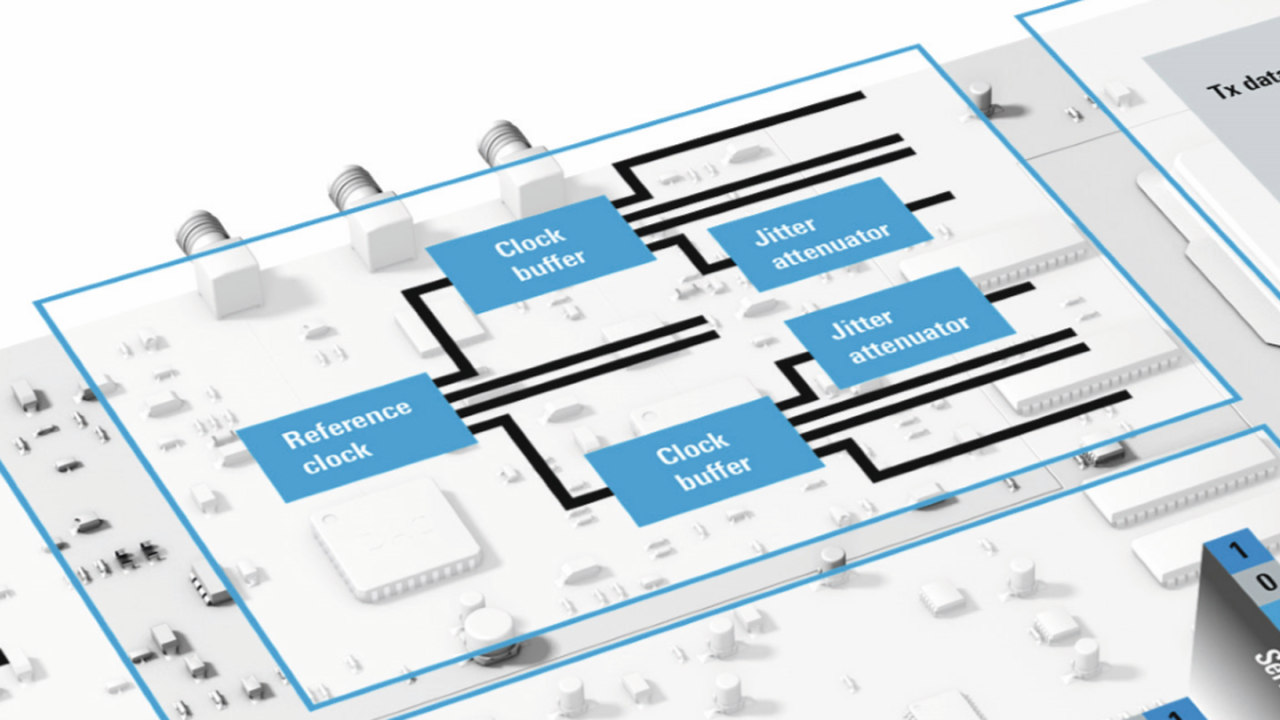
Древовидная структура тактирования
Измерительная задача
Измерение джиттера тактовых генераторов высокоскоростных цифровых устройств становится все более сложной задачей. Интерфейс PCIe 5.0, например, использует скорость передачи данных до 32 гигатранзакций в секунду (ГТ/с) с соответствующим пределом джиттера 150 фс (СКЗ) для опорного тактового сигнала. В спецификациях новейшего интерфейса PCI 6.0 указана скорость передачи данных до 64 гигатранзакций в секунду (ГТ/с) с пределом джиттера 100 фс (СКЗ) для опорного тактового сигнала. У анализаторов фазового шума превосходный уровень измерения джиттера, поэтому они идеально подходят для измерения джиттера в современных высокоскоростных тактовых сигналах. Чтобы снизить влияние электромагнитных помех в таких технологиях, как PCIe, USB и HDMI™, обычно используют синхронизацию с расширенным спектром (SSC), применяя к опорному тактовому генератору низкочастотную ЧМ-модуляцию. Поскольку при использовании SSC возникает дополнительная нагрузка на тактовый генератор, джиттер тактовых импульсов также необходимо проверять при включенном режиме SSC.
Решение компании Rohde & Schwarz
Измерение джиттера тактовых импульсов обычно состоит из следующих этапов:
- Измерение фазового шума
- Взвешивание фазового шума на основе соответствующей передаточной функции системы
- Интегрирование взвешенного фазового шума в определенной области интегрирования джиттера
Измерение фазового шума
Для тактовых генераторов с высокой крутизной сигнала джиттер тактовых импульсов, в основном, определяется фазовым шумом тактового генератора. Поскольку АМ-шум в значительной степени подавляется за счет высокой крутизны тактовых импульсов, он обычно не вносит заметного вклада в общий джиттер тактовых импульсов. Для точной оценки джиттера тактовых импульсов важна высокая степень подавления амплитудной модуляции при измерении фазового шума.
Взвешивание фазового шума
При измерении джиттера в высокоскоростных шинах, таких как PCIe, обычно необходимо учитывать влияние на систему передаточных функций TX PLL, RX PLL и CDR. Результирующая общая передаточная функция системы применяется к результатам измерения фазового шума в качестве взвешивающего фильтра перед интегрированием джиттера в заданной области.
Интеграция взвешенного фазового шума
Взвешенный фазовый шум обычно интегрируется до частоты Найквиста тактового генератора (половины тактовой частоты), а в некоторых случаях даже до более высоких частот. В этом случае фазовый шум также необходимо измерять до более высоких смещений частоты.
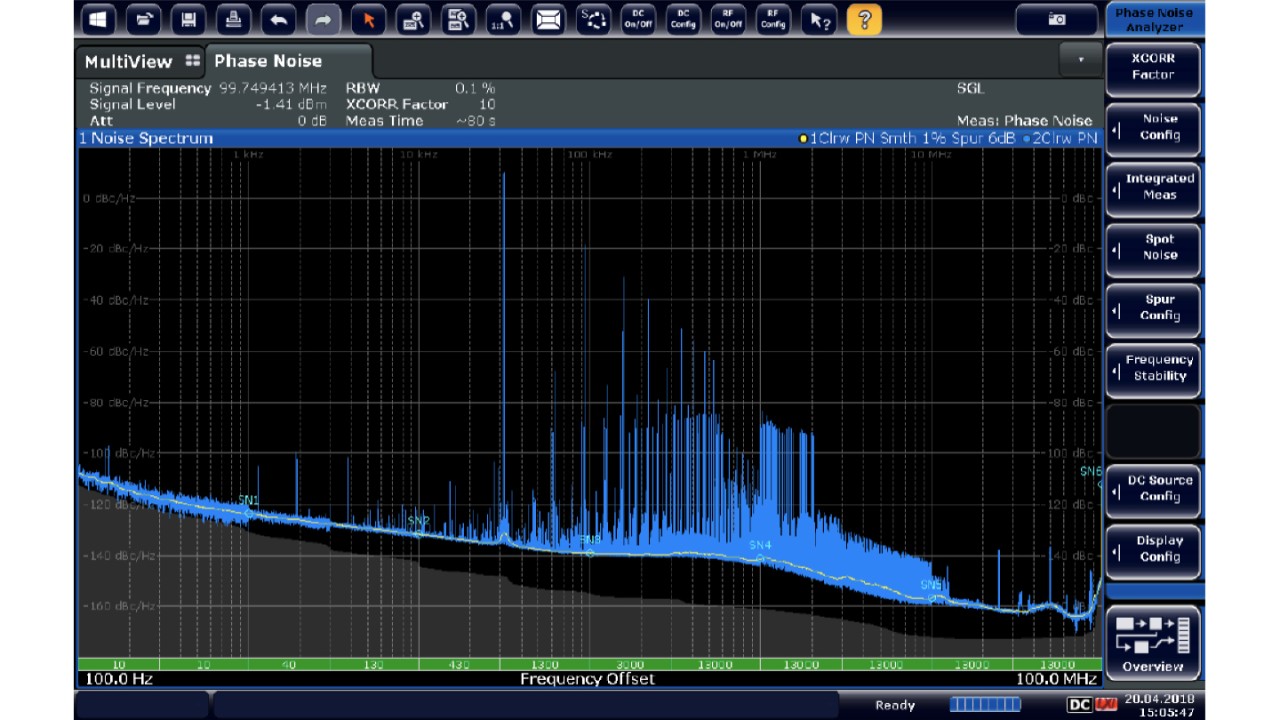
Измерение джиттера тактового сигнала шины PCIe (SSC ON).
Тактовый генератор PCIe без поддержки SSC: фазовый шум и взвешенный джиттер.
Тактовый генератор PCIe с поддержкой SSC: фазовый шум.
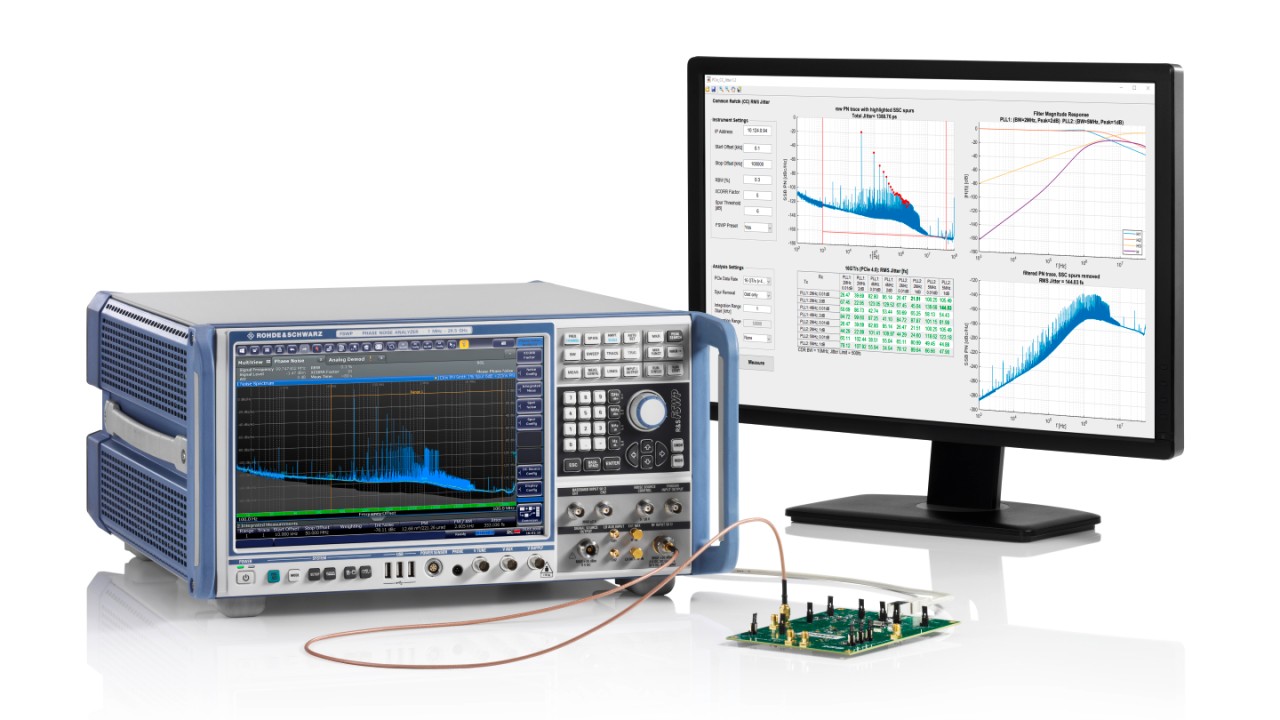
Благодаря архитектуре цифрового демодулятора анализатор фазового шума и тестер ГУН R&S®FSWP способен параллельно выполнять измерения фазового шума и АМ-шума, обеспечивая высокую степень подавления амплитудной модуляции при измерениях фазового шума. Эта архитектура также позволяет измерять опорные тактовые сигналы в режиме включенного (SSC ON) режима расширения спектра. Прибор также обладает лучшей в отрасли чувствительностью к фазовому шуму, которую можно дополнительно улучшить, добавив опцию кросс-корреляции R&S®FSWP-B60 или R&S®FSWP-B61. Прибор можно дополнить функциями анализатора спектра и сигналов с помощью опции R&S®FSWP-B1, которая позволяет проводить анализ эффектов взаимосвязи в сложных структурах дерева тактирования.
Для скорости передачи данных 32 ГТ/с в соответствии с PCIe 5.0 определены 16 различных системных функций передачи. В каждой из этих функций взвешенный джиттер не должен превышать 150 фс. В режиме SSC ON необходимо перед применением взвешивания и интегрирования джиттера удалить спуры SSC (основная частота и гармоники) до 2 МГц. Для удобства в разделе скачиваний настоящих рекомендаций по применению размещен необходимый внешний программный инструмент. Этот инструмент автоматизирует измерение и постобработку данных (удаление выбросов SSC, взвешивание, интегрирование джиттера, определение максимального джиттера среди различных передаточных функций системы). Инструмент поддерживает R&S®FSWP (требуется опция R&S®FSWP-B60 или R&S®FSWP-B61), а также R&S®FSPN и поддерживает версии PCIe вплоть до PCIe 6.0.
Измерение джиттера тактового сигнала шины PCIe (SSC ON).

Тактовый генератор PCIe без поддержки SSC: фазовый шум и взвешенный джиттер.
Тактовый генератор PCIe с поддержкой SSC: фазовый шум.