Энкодер: что это такое, принцип работы, виды, для чего используется
Энкодер – это устройство для замеров тех или иных параметров цифровыми методами. К таковым могут относиться параметры передвижения деталей, углы их поворота, направление перемещения, скорость. Энкодер еще называют преобразователем угловых помещений.

Наиболее важный параметр прибора – число импульсов, которые образуются в течение совершения одного оборота. Это так называемая разрядность энкодера. Иногда ее еще называют разрешением или разрешающей способностью. Как правило, параметры разрешающей способности равны 1 024 за каждый оборот.
Среди прочих важных конструктивных параметров выделяют:
- Рабочее напряжение на устройстве.
- Тип вала – он может быть как пустым, так и сплошным.
- Размеры вала и отверстия.
- Способ выхода.
- Габариты корпуса устройства.
- Метод крепления.
Разновидности энкодеров
Любой энкодер представляет собой поворотный датчик. Самая простая его конструкция оснащается ручкой, которая может осуществлять повороты в разные стороны. От того, на сколько углов было совершено вращение, а также от направления вращения и будет зависеть цифровой сигнал на выходе.
Эти устройства принято разделять по таким критериям:
- инкрементные и абсолютные;
- оптические, магнитные и механические.
Энкодер инкрементного типа образует импульсы, которые определяются устройством считывания информации. Это и позволяет им определять положение того или иного объекта, а также подсчитывать количество импульсов.
Когда устройство приводится в работу, настоящее положение целевого объекта еще неизвестно. Для того чтобы подключилась система отсчета, используется нулевая отметка. Через нее вал проходит после включения энкодера.

При всех своих плюсах, данная разновидность устройств имеет некоторые недостатки. Например, то, что определение пропуска импульсов от преобразовательного устройства невозможно. Порой это способствует накоплению ошибок во время определения угла поворота. Чтобы избежать этого, применяют пару каналов измерения – синусные и косинусные.
Абсолютные энкодеры имеют специальный поворотный круг, который разделен на специальные секторы, как правило, имеющие одинаковые размеры и пронумерованные. Когда устройство включается в работу, выдается тот или иной номер сектора, где оно находится в данный момент. Отсюда и название – абсолютный энкодер. Данная конструктивная особенность позволяет быстро определить как угол, так и положение, а также направление вращения. Данные параметры определяются относительно нулевого сектора диска.

Абсолютные угловые датчики не требуют соединения системы отсчета с нулевым значением. Для начала определения положения и иных показателей в них применяется так называемый код Грея. Именно он позволяет избегать ошибок.
Можно назвать лишь один недостаток данного типа датчика – это необходимость постоянного перевода в двоичные коды для определения положения. Оптический тип датчика конструктивно предусматривает наличие оптического растрового диска, который закрепляется на вал. Когда тот вращается, формируется световой поток, затем он воспринимается фотоприемником.
Оптические энкодеры абсолютного типа – это устройства, в которых каждая позиция вала обладает своим выходным цифровым кодом, являющимся главным показателем для устройства. Согласно ему и производятся вычисления, а также закрепление параметров передвижения диска.
Существует также магнитная разновидность энкодеров, которые регистрируют движение подвижных магнитных элементов. Затем данные переводятся в определенные сигналы, понятные системе.

Наконец, механические энкодеры. Они имеют диск, изготовленный из диэлектрика, на котором нанесены выпуклые, либо непрозрачные области. Значение абсолютного угла считывается при помощи линейки контактов и переключателей. Здесь также работает код Грея. Он позволяет устранить неоднозначные интерпретации сигналов.

В качестве минусов данных типов энкодеров можно назвать разбалтывание контактов со временем. Это будет приводить к тому, что сигнал подвергнется искажению, выдавая не всегда достоверные подсчеты. Датчики оптических и магнитных моделей лишены данного недостатка.
Кроме того, различают одно- и многооборотные энкодеры. Однооборотным является датчик, выдающий показания по абсолютному значению в рамках вращения на 360 градусов, то есть внутри одного оборота. После того, как оборот будет совершен, код начинает считываться заново. Обычно датчики таких моделей находят свое применение в антенных системах, коленчатых прессах и т.п.
Многооборотные устройства, как несложно догадаться, рассчитаны на счет кодов в течение определенного числа оборотов. К примеру, для линейных проводов, либо для измерительных задач при помощи зубчатых измерительных штанг данный подход считается неприменимым. Тогда выручают датчики, которые не только измеряют углы поворотов внутри одного вращения, но и регистрируют количество вращений посредством особого передаточного устройства.
Особенности настроек и подключения
Монтажом энкодеров должен заниматься только профессиональный мастер. Они монтируются обычно на том валу, с которого считывается информация. Применяются переходные муфты для компенсации различия размеров. Корпус энкодера необходимо как можно более прочно закрепить.
Если же речь идет о монтажных работах на полом валу, то требуется прибегнуть к иному методу. В этом случае вал включается внутри датчика и монтируется внутри полой втулки. При этом сам корпус считывающего устройства закреплять не следует.
Если брать самый элементарный случай подключения, то, по возможности, следует подключить выход преобразователя к входу счетного устройства, и запрограммировать его на определенные параметры скорости.
В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
- Величина импульсов, которая производится в момент одного оборота диска в процессе работы. Может варьироваться от 1 до 5 тысяч импульсов.
- Для абсолютных энкодеров важна такая характеристика, как разрядность бит или их количество.
- Тип вала, используемого в устройстве, может отличаться — он бывает с прямой осью или полый.
- Учитывается разновидность используемого фланца на валу под шпонку.
- Сигнал при выходе может отличаться.
- Уровень напряжения питания.
- Используемый тип разъема и длина кабеля.
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения. Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.
Где может быть использовано устройство
Существует немало сфер и областей, в которых энкодеры нашли широкое применение. Достаточно рассмотреть наглядные примеры использования этих устройств, чтобы убедиться в их популярности:
- В механизмах, работающих для нужд печатной промышленности, эти датчики контролируют вращение валов, по которым проходит бумага и краска.
- На предприятиях, где ведется металлообработка, они задействованы при вращении валов с металлическими лентами.
- При конструировании различных моделей и устройств в области робототехники помогают контролировать движение различных частей робота.
- В автомобилестроении с помощью датчиков определяется угол поворота колеса.
- Городское хозяйство нельзя представить без лифтов – для их работы также требуются энкодеры.
- В пищевой и химической промышленности необходимо постоянно фасовать продукцию в больших объемах. Этим занимаются автоматизированные устройства, в которых установлены энкодеры.
- Даже в домашних условиях можно легко найти предмет, в котором есть энкодер — это компьютерная мышь, которая есть практически в каждой квартире.
- В различных электротехнических устройствах, например, сервомоторах, требующих высокой точности, также установлены датчики.
В зависимости от сферы использования и особенностей устройства, энкодеры могут решать различные задачи. Они измеряют угловые положения, помогают определить позиционирование объектов, детектируют положение в пространстве, могут проводить определение позиций с высокой точностью, а также измерять вращательные движения.
Преимущества и недостатки энкодеров.
К плюсам данных устройств можно отнести:
- Дешевизну и простоту в монтаже и применении.
- Минимальное количество ошибок во время подсчета импульсов, либо полное их отсутствие.
- Универсальность использования.
- Возможность определения направления вращения замеряемого объекта.
Существуют и определенные недостатки:
- Возможные ошибки при запуске системы и наличие ошибок во время работы. Особенно это будет проявляться в случае неверно выбранного типа энкодера и его монтажа.
- Наличие некоторых ограничений в плане обеспечения разрешающей способности – при повышении степени точности определения потребуется увеличивать и число рабочих каналов.
- Необходимость преобразования двоичного кода Грея в некоторых типах датчиков.
Стоит заметить, что эти и прочие недостатки с лихвой перекрываются удобством и универсальностью энкодеров.
Вы всегда можете приобрести энкодеры Omron и Sick по привлекательным ценам в нашем интернет-магазине.
Что такое энкодер в магнитоле
Энкодер — это устройство, которое преобразует вращательное движение вала в серию электрических импульсов. Некоторые знают определенные виды оборудования, где ручка способна вращаться при настройке какого-то параметра (например, аудиоусилителя). Некоторые из них также оснащены кнопкой, где при нажатии на ось происходит контакт (например, в устройствах, использующихся на многих музыкальных контроллерах). Они бывают всех видов разрешений, считывают от 16 до 1024 сигналов при полном обороте.
Энкодеры также очень часто используются для подсчета угла поворота в двигателях. В автоматизации и робототехнике, это крайне необходимые устройства. Далее рассмотрен принцип работы и подключения устройства.
Типы поворотных энкодеров и как они работают
Прежде чем разбирать принцип подключения энкодера, стоит рассмотреть основные виды этих устройств и разобрать их конструкцию.
Механический поворотный энкодер
Поворотный угловой энкодер — это тот, который измеряет абсолютный угол закодированного вала, имея уникальный код для каждого положения вала. При этом каждая позиция диапазона/угла измерения, идентифицируется определенным кодом. Это означает, что отпадает необходимость в счетчиках, поскольку позиционные значения всегда доступны напрямую, даже если питание отключено.

Механический поворотный энкодер — это распространенный, недорогой вариант, который состоит из металлического диска и работает следующим образом:
- Металлический диск, расположенный на вале, используется вместе со стационарным подборщиком и вращается.
- Во время вращения, создается уникальный сигнал преобразуемый в код.
- Это означает, что каждое изменение положения фиксируется.
- Код используется для определения точного положения вала.
Приведенное выше объяснение относится к принципу работы механического датчика абсолютного вращения, но есть два других способа, с помощью которых можно обнаружить изменение положения и изменения оптических либо магнитных датчиков.
Оптические поворотные энкодеры
Оптические энкодеры состоят из диска, вала, стекла либо пластика с прозрачными и непрозрачными поверхностями, что позволяет источнику света и фотодетектору обнаруживать оптические сигналы. Такое обнаружение помогает определить позицию вала в любое время.

Процесс определения положения с помощью оптических энкодеров:
- Диск, прикрепленный к валу, вращается.
- В зависимости от положения диска, проходящий свет либо пропускается, либо блокируется.
- Полученный проходящий свет преобразуется в электрический сигнал.
- Преобразованный сигнал затем становится цифровым. Это используется для определения положения, скорости, угла и прочих параметров.
Магнитные энкодеры
Магнитные приборы состоят из серии магнитных полюсов для обозначения положения устройства и датчиков, которые обычно работают на эффекте Холла. Данное устройство имеет тот же принцип работы, что и оптические энкодеры, но вместо света, датчики обнаруживают изменение магнитных полей.

Процесс определения положения с помощью магнитных энкодеров:
- Присоединенный диск вращается.
- Магнитные датчики обнаруживают изменение магнитного поля из-за вращения.
- Такие изменения преобразуются в синусоидальные волны и преобразуются в цифровые сигналы для получения желаемого результата.
Инкрементальный энкодер
По сравнению с предыдущими энкодерами, инкрементальный работает, замеряя изменения углового смещения, а не считывая абсолютный угол закодированного вала.
Инкрементальный энкодер, также известный как квадратурный, имеет два выходных сигнала, A и B, которые генерируют прямоугольные волны при вращении вала. Частота прямоугольной волны указывает скорость вращения вала, а соотношение фаз AB указывает направление вращения.

Поворотные инкрементальные энкодеры определяют количество вращений через отдельный счетчик, который подсчитывает количество импульсов, выдаваемых в ответ на величину вращательного смещения вала.
Инкрементальные энкодеры проходят процесс определения положения с помощью магнитных угловых устройств:
- Происходит вращательное смещение вала.
- В результате кодер выдает соответствующую последовательность импульсов.
- Отдельный счетчик, помещенный в контрольную точку, подсчитывает количество импульсов для получения желаемого результата.
Различия поворотного энкодера и потенциометра
Чтобы лучше понять описываемое устройство, стоит сравнить его с похожим — потенциометром. Не вдаваясь в подробности описания, можно сказать, почему поворотные энкодеры в настоящее время являются более предпочтительным вариантом:
- Цифровой вход у энкодера более современен по сравнению с аналоговым у потенциометра. Это позволяет легко использовать микроконтроллер для преобразования выходных данных.
- Возможность непрерывного вращения.
- Четкое угловое положение, с более высокой точностью и без ограничения угла поворота.
Тем не менее, с учетом сказанного, на рынке существуют цифровые потенциометры, которые обеспечивают сопряжение с платами микроконтроллеров. Однако по остальным параметрам, на данный момент потенциометр проигрывает энкодеру.
Выбор лучших энкодеров для Ардуино
Чтобы упростить процесс выбора энкодера к Arduino, здесь будет подборка каждого варианта.
Поворотный энкодер EC11

Нужен простой угловой энкодер, который поможет начать распознавать вращающийся вал с помощью Ардуино? Тогда стоит выбрать EC11.
Устройство имеет в общей сложности 5 контактов, 3 с одной стороны для вращательного кодирования, которым требуется простая цепь для подачи постоянного тока 5В. Два других замыкаются при нажатии, поэтому нет недостатка в какой-либо функциональности при использовании этого энкодера с Ардуино.
Магнитный энкодер Grove AS5600
Нужно устройство, которое может одновременно работать как магнитный потенциометр или магнитный энкодер с отличной надежностью и долговечностью? Тогда это устройство отлично подойдет.

Оно не только работает в обоих направлениях, но по сравнению с традиционным энкодером/потенциометром, Grove AS5600 бесконтактный, без ограничения угла поворота, обеспечивает высокоточный сигнал. Все это стало возможным благодаря встроенному AS5600, основанному на эффекте Холла.
Grove — оптический поворотный прибор
Этот оптический датчик угла поворота (для уно, нано и других) включает в себя инфракрасный излучатель и два фототранзисторных детектора. Подходит не только для определения скорости/вращения, но и для определения направления вращения.

- двойные фототранзисторные детекторы, могут определять направление вращения;
- встроенные светодиодные индикаторы;
- интерфейс Grove для простоты использования с Ардуино.
Подключение поворотного энкодера с Ардуино
Теперь, когда принципы работы различных энкодеров изучены, можно приступить к описанию схемы подключения к Ардуино.
Для этого понадобятся:
Обзор поворотного энкодера
Поворотный энкодер — это датчик, используемый для определения углового положения вала, подобный потенциометру.

Пины, и что они означают:
- CLK: выход A (цифровой);
- DT: выход B (цифровой);
- SW: нажатие кнопки (цифровой);
- + : VCC-напряжение питания;
- GND: заземление.
Поворотный прибор может быть использован в основном для тех же целей, что и потенциометр. Однако потенциометр обычно имеет точку, за которую вал не может вращаться, в то время как энкодер может вращаться в одном направлении без ограничений. Чтобы сбросить показания положения, нужно нажать на вал вниз.
Данное устройство определяет угловое положение вращающегося вала с помощью серии прямоугольных импульсов. Он по существу имеет равномерно расположенные контактные зоны, соединенные с общим узлом, а также два дополнительных контакта, называемых A и B, которые находятся на 90 градусов вне фазы. Когда вал вращается вручную, контакты A и B синхронизируются с общим контактом и генерируют импульс. Подсчитав количество импульсов любого из этих выходов, можно определить положение вращения.
Чтобы определить направление и проверить, вращается ли штифт по часовой стрелке или против часовой стрелки, нужно сделать следующее:

- Если вращающийся вал движется по часовой стрелке, то сигнал A опережает B. В одни и те же моменты времени, A и B будут находиться на противоположных частях прямоугольной волновой функции.
- Если вал движется против часовой стрелки, то сигнал B опережает A.
Подключение
Если говорить в общем, то CLK, DT и SW, должны быть подключены к цифровым выводам на Ардуино, + должен быть подключен к 5V, а GND заземлен.
Пошаговая инструкция подключения проводов энкодера к Ардуино:

- CLK: подключите конец провода к пину CLK на поворотном энкодере, затем к любому цифровому выводу на Arduino (оранжевый провод).
- DT: подключите конец провода к пину DT, затем к любому цифровому контакту на Arduino (желтый провод).
- SW: подключите конец провода к пину SW, далее к любому цифровому контакту на Arduino (голубой провод).
- + : подключите провод к пину +, затем к контакту +5V на Arduino (красный провод).
- GND: подключите конец провода к пину GND на энкодер с контактом GND на Arduino. (Черный провод).
Как кодировать
Код изменяет высоту тона в зависимости от того, в каком направлении повернут энкодер. Когда он поворачивается против часовой стрелки, шаг уменьшается, а когда он поворачивается по часовой стрелке, шаг увеличивается.
- датчик поворотного энкодера;
- Ардуино;
- пьезодатчик;
- провода.
int buzzer_pin = 3;
int pinA = 7;
int pinB = 6;
int pinC = 5;
int pitch = 956;
int aState;
int aLastState; void setup() pinMode (pinA,INPUT);
pinMode (pinB,INPUT);
//pinMode (pinC,INPUT);
//digitalWrite(pinC, HIGH);
pinMode(buzzer_pin, OUTPUT);
Serial.begin (9600);
// Starts output
aLastState = digitalRead(pinA);
> void loop() aState = digitalRead(pinA); if (aState != aLastState) // outputB != outputA state, encoder is rotating clockwise
if (digitalRead(pinB) != aState) movedClockwise();
//counter ++;
>
else //counter —;
movedCounterClockwise();
>
play_specific_pitch(pitch);
>
aLastState = aState;
>void movedClockwise() if ((pitch)
>void movedCounterClockwise() if ((pitch) > 100) pitch = pitch — 100;
>
>void play_specific_pitch(int pitch) for (long i = 0; i
Serial.println(pitch);
>
Описание кода
Это все, что нужно для этого примера. Если загрузить код, запустить монитор и начать вращать вал, значения станут отображаться на мониторе.
Упрощенный пример
Следующий пример кода продемонстрирует, как считывает сигналы Arduino на датчике энкодера. Он просто обновляет счетчик (encoder0Pos) каждый раз, когда энкодер поворачивается на один шаг, а параметры вращения отправляются на порт ПК.
/ * Чтение квадратурного энкодера
Подключите энкодер к контактам encoder0PinA, encoder0PinB и + 5V.
* /
int val;
int encoder0PinA = 3;
int encoder0PinB = 4;
int encoder0Pos = 0;
int encoder0PinALast = LOW;
int n = LOW;
void setup () pinMode (encoder0PinA, INPUT);
pinMode (encoder0PinB, INPUT);
Serial.begin (9600);
>
void loop () n = digitalRead (encoder0PinA);
if ((encoder0PinALast == LOW) && (n == HIGH)) if (digitalRead (encoder0PinB) == LOW) encoder0Pos—;
> else encoder0Pos ++;
>
Serial.print (encoder0Pos);
Serial.print («/»);
>
encoder0PinALast = n;
>
Следует обратить внимание на то, что приведенный выше код не является высокопроизводительным. Он предоставлен для демонстрационных целей.
Дальнейшее описание, включая форму волны энкодера
Ниже приведено изображение, показывающее формы сигналов каналов A и B кодера:

Это может прояснить, как работает выше указанный код. Когда устройство обнаруживает переход от низкого к высокому уровню на канале A, он проверяет, перешел ли канал к B высоким или низким уровням. Затем происходит увеличение/уменьшение переменной, чтобы учесть направление, в котором кодер должен вращаться. Это нужно, чтобы генерировать найденную форму волны. Также на изображении показаны переходы красным или зеленым цветом. Они зависят от того, в каком направлении движется кодировщик.
Одним из недостатков приведенного выше кода является то, что на самом деле он учитывает только одну четверть возможных переходов.
Руководство по энкодерам и тому, как оно подключается к Ардуино, закончилось. Благодаря этому можно получить общее представление о том, что из себя представляют данные устройства, и как они работают.

Валкодер на панели управления автомагнитолы
В практике ремонта автомагнитол бывают случаи, когда устранение неисправности решается простой чисткой.
При длительной эксплуатации автомагнитол возникают неполадки, связанные с механическими элементами прибора. Поскольку всё управление автомагнитолой происходит через переднюю съёмную панель, то и поломке подвергаются те элементы, которые на ней установлены. Обычно это всевозможные кнопки, реже миниатюрные лампы подсветки дисплея (у более старых автомагнитол), регуляторы громкости, многоконтактный разъём, соединяющий съёмную панель с основной частью автомагнитолы.
Вы наверняка видели, что у многих автомагнитол роль регулятора громкости выполняет не набор кнопок, а валкодер. В официальной документации валкодер, как отдельную радиодеталь, принято называть энкодером, хотя по сути это одно и то же. Кроме этого данное чудо техники называют шаттлом. Но слово шаттл означает уже встроенный в прибор элемент управления, а не отдельную радиодеталь.
Так выглядит энкодер
Чем удобен валкодер?
Важно понять, что валкодер является частью цифровой электроники и служит он для ввода информации посредством поворота ручки регулятора. Всё управление происходит посредством изменения угла поворота ручки валкодера. Сам валкодер внешне очень похож на обычный переменный резистор, который ранее применялся в полуцифровых и аналоговых автомагнитолах для регулировки громкости.
Но если с помощью переменного резистора выполнялась лишь одна функция – регулировка звука, то с помощью валкодера возможна регулировка громкости звука, установка параметров низких и высоких частот, навигация по меню и многое, многое другое. Естественно, такая широкая функциональность возможна лишь с применением цифровой электроники.
Энкодеры можно встретить в любой технике, где применяется цифровое управление функциями.
Всё бы хорошо, валкодер вне всяких сомнений является очень удобным, компактным и многофункциональным. Но поскольку он имеет механические части конструкции, то рано или поздно он выходит из строя.
Так, при неисправности валкодера, наиболее часто имеет место следующая неисправность у автомагнитол:

При повороте ручки валкодера звук регулируется хаотично. Показания уровня громкости на дисплее также хаотично изменяются. При этом точная установка уровня громкости очень сложна и доставляет массу неудобств.
Что делать в случае, когда неисправен энкодер?
Заменять неисправный энкодер лучше новым, но что делать, если его нет в наличии или его трудно достать? В таком случае можно починить неисправный, правда, для устранения поломки потребуется разборка энкодера.
Устройство энкодера напоминает конструкцию обычного переменного резистора. Как уже говорилось, даже по внешнему виду они очень схожи.

Внешне энкодер очень похож на обычный переменный резистор
Обычно в энкодеры, которые применяются в цифровых автомагнитолах, встраивают микрокнопку, которая служит неким аналогом кнопки ENTER (ввода или подтверждения выбора). Эта кнопка расположена под валом регулятора (см. фото). У валкодера три вывода. Вместе с выводами от микрокнопки – 5. Также для жёсткой установки на плату предусмотрены два широких вывода от верхней планки корпуса. Они запаиваются в плату.

Энкодер в разобранном виде
Перед тем, как приступить к разборке валкодера и его чистке необходимо выпаять его из печатной платы передней панели. На первый взгляд операция простая, но на практике процесс осложняется тем, что рядом с энкодером обычно находятся мелкие SMD элементы и есть вероятность при выпайке валкодера их повредить.
Поэтому для демонтажа энкодера с печатной платы лучше воспользоваться специальным инструментом для выпайки многовыводных деталей. Подробнее об этом читайте здесь.
Разбирать валкодер стоит аккуратно без применения излишней силы. Главная задача – добраться до внутренних контактов и почистить их от грязи и окислов. Можно слегка отогнуть подвижные контакты, чтобы они лучше контактировали с фиксированными контактами при скольжении.
Чистку контактов лучше производить специальными средствами. Для этого можно использовать, например, спрей-очиститель DEGREASER. Он легко наноситься на поверхность, быстро испаряется не оставляя следов, хорошо очищает от застывшей канифоли, окислов, грязи и мелкодисперсной пыли. Спрей лучше нанести на зубную щётку в небольшом количестве и затем аккуратно почистить поверхность внутренних контактов валкодера. После этого проводим сборку валкодера и впаиваем в печатную плату.
Обычно, после проведения такой чистки валкодер работает стабильно и неисправность с хаотичной регулировкой громкости больше не проявляется.
Энкодер что это такое? Весьма часто в автомагнитоле, принтере, и других электронных устройствах можно видеть такие электронные компоненты, как энкодер. Так что же это такое? Может быть это переменный резистор? Вовсе нет.
Также энкодеры идеально подходят для реализации навигации по различным меню.
Инкрементальные энкодеры бывают оптическими, магнитными, контактными. Вне зависимости от принципа устройства все инкрементальные энкодеры на выходе генерируют 2 линии (A и B) с импульсами смещенными относительно друг друга. Именно по смещению импульсов можно судить о направлении вращения. А по количеству импульсов — об угле поворота.
Каждый инкрементальный энкодер имеет следующую основную характеристику — дискретность (количество шагов, положений между импульсами, на один оборот вала). Благодаря дискретности, можно вычислить угол единичного изменения положения. Например, энкодер Borns 3315-9 за полный оборот генерирует 30 импульсов. А это значит, что каждый шаг эквивалентен повороту на 12°. Помимо этого, вал энкодера фиксируется в каждом положении между каждой пачкой импульсов.
Классифицировать энкодеры можно распределив их по четырём большим группам:
- контактные энкодеры
- магнитные энкодеры
- оптические энкодеры
- энкодеры для аудиоаппаратуры

Если мы говорим контактных механических энкодерах то, ключевым элементом энкодера являются две пары подпружиненных контактов и металлическая пластина с засечками с компактным механизмомм размыкателя. При вращении вала, каждая пара контактов замыкается и размыкается. Но эти пары контактов расположены таким образом, что при вращении вала энкодера в разные стороны порядок замыкания/размыкания контактов разный и, благодаря этому моменту, можно определить направление вращения вала механического энкодера.
Магнитные энкодеры для своей работы используют эффект Холла, обеспечивающий изменение проводимости полупроводника в зависимости от значени индукции магнитного поля. Оптические или оптоэлектронные энкодеры содержат в себе миниатюрную оптопару, и крыльчатку обеспечивающую преобразование угла поворота в пачки импульсов.
В очередном уроке мы рассмотрим работу Arduino с энкодером (который служит для преобразования угла поворота в эл. сигнал). С энкодера мы получаем 2 сигнала (А и В), которые противоположны по фазе. В данном уроке мы будем использовать энкодер фирмы SparkFun COM-09117, который имеет 12 положений на один оборот (каждое положение 30°). На приведенной ниже диаграмме вы можете видеть, как зависят выход А и В друг от друга при вращении энкодера по часовой или против часовой стрелки.
Каждый раз, когда сигнал А переходит от положительного уровня к нулю, мы считываем значение выхода В. Если В в этот момент находится в положительном состоянии, значит энкодер вращается по часовой стрелке, если В нуль, то энкодер вращается против часовой стрелки. Считывая оба выхода, мы при помощи МК можем определить направление вращения, и при помощи подсчета импульсов с А выхода — угол поворота. Конечно можно пойти еще дальше и при помощи вычисления частоты, можно определить насколько быстро происходит вращение энкодера. Как вы видите, энкодер имеет много преимуществ по сравнению с обычным потенциометром.
Используя энкодер мы будем управлять яркостью LED светодиода при помощи ШИМ выхода. Для считывания данных энкодера мы будем использовать простейший метод, основанный на программных таймерах, которые мы изучали в третьем уроке.
Как было сказано выше, мы будем использовать энкодер sparkfun. Первое, что необходимо сделать, это определить как часто нам нужно обращаться к выходам энкодера для считывания значений. Итак, представим себе, что в лучшем случае, мы можем повернуть ручку энкодера на 180° за 1/10 сек, т.е. это будет 6 импульсов за 1/10 сек или 60 импульсов в секунду. В реальности быстрее вращать не сможете. Т.к. нам необходимо отслеживать все полупериоды, то частота должна быть минимум 120 Герц. Для полной уверенности, давайте примем 200 Гц. (Примечание: т.к. у нас механический энкодер, то возможен дребезг контактов, а низкая частота позволяет отфильтровывать дребезг).
По сигналам программного таймера нам необходимо постоянно сравнивать текущее значение выхода А энкодера с предыдущим значением. Если состояние изменилось от положительного к нулю, то мы проверяем значение выхода В и смотрим положительное оно или нет. В зависимости от полученного результата мы увеличиваем или уменьшаем счетчик значения яркости светодиода.
Программа для данного урока приведена ниже. Она построена на базе предыдущего урока Fade, где использовалась функция millis() для задания временных интервалов. Временной интервал у нас будет 5 мс (200 Гц)
Колтыков А.В. Опубликована: 2011 г. 0 1

Вознаградить Я собрал 0 0
Энкодер — это специальный датчик для измерения характеристик вращения каких-либо объектов. Другое название приборов — датчики угла поворота.
Эти устройства фиксируют параметры вращения и преобразуют их в последовательность электрических сигналов. Характеристики этих сигналов определяются значением угла поворота.

Характеристики
Основная характеристика датчиков поворота — разрядность. Разрядность энкодера — это количество импульсов за один оборот. Ее также называют разрешением. Как правило, разрешение составляет 1024 за один оборот.
Другие конструктивные и функциональные особенности этих приборов:
- тип вала — пустой или с прямой осью;
- размеры отверстия и вала;
- рабочее напряжение;
- размеры корпуса прибора;
- способы выхода;
- разрядность (количество бит);
- сигнал на выходе;
- есть энкодер с кнопкой;
- длина кабеля и тип разъема;
- способ крепления.
Где применяют энкодеры
На вопрос, что это за устройство такое — энкодер, можно ответить перечислением того, где используют данные приборы. Сферы применения угловых датчиков зависят от их сложности и способности выдерживать нагрузки.
Датчики поворота используют наиболее часто на станкостроительных заводах, в системах точного перемещения, робототехнических комплексах, в измерительных устройствах, где требуется точная фиксация поворотов, наклонов, вращений.

В промышленности и сложных механизмах, используют высокопроизводительные энкодеры, устойчивые к тепловому воздействию и взрывам.
Другие области и механизмы, в которых применяют эти датчики:
- в печатной промышленности: устройства устанавливают на валах, по которым движется бумага;
- в автомобилестроении: с их помощью определяют угол поворота колес (иногда взаимодействуют с движками);
- на металлообрабатывающих предприятиях для контроля вращения валов с металлическими лентами;
- в химической и пищевой промышленности: на оборудовании автоматизированной фасовки;
- в электротехнике.
Пример использования прибора есть почти в каждом современном доме. Это обычная компьютерная мышь, в которой также установлен такой датчик.

Общие плюсы и минусы
Прежде, чем рассмотреть разные типы энкодеров, стоит сказать об общих преимуществах и недостатках этих датчиков.
- Доступная цена.
- Простой монтаж и использование.
- Высокая точность измерений.
- Универсальность — возможность применения на широком спектре приборов и оборудования.
- Возможность определить направление вращения объекта.
- Возможные ошибки в измерениях, если выбран прибор неправильного типа или нарушена технология установки.
- Схема подключения зависит от типа и сферы применения.
- В некоторых видах энкодеров нужно постоянно преобразовывать код Грея.
- Ограниченная разрешающая способность. Чтобы повысить точность измерений, нужно добавлять дополнительные каналы.
Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
Инкрементальные энкодеры
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.

Этот вид работает следующим образом. У него есть начальная нуль-метка, или выход Z, и два дополнительных выхода — A и B. Датчик создает две линии сигналов со смещенными на четверть фазы импульсами относительно друг друга. Разница импульсов указывает на направление вращения, а их количество — на угол поворота.

Разновидность инкрементальных энкодеров — сдвоенные, или квадратурные. Они состоят из двух датчиков, которые срабатывают со смещением в полшага. Квадратурные считают количество импульсов и учитывают направление.
У инкрементальных два главных минуса. Во-первых, нужно постоянно обрабатывать и анализировать сигнал, для чего используют контроллер и специальную программу. Во-вторых, они требуют синхронизации с нулевой меткой после включения. Для этого требуется инициализация для поиска выхода Z.
Абсолютные энкодеры
Датчики такого типа устроены более сложно. Но они позволяют определить величину угла поворота сразу после включения, не требуя синхронизации с нулевой меткой.
В основе конструкции поворотный круг, разделенный на одинаковые по размеру пронумерованные секторы. После включения устройства определяется номер сектора, на котором оно находится. Такое решение позволяет сразу зафиксировать положение, угол и направление вращения.

Принцип работы абсолютного энкодера основан на использовании кода Грея для определения текущего положения и других параметров. В них не требуется синхронизация с нулевым значением.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Многооборотные датчики поворота
Абсолютные энкодеры могут быть однооборотными и многооборотными.
Однооборотные показывают абсолютное значение после одного оборота. После этого код возвращается к начальному значению. Такие датчики используют в основном для измерения угла поворота.
Если нужно измерять обороты в системах с линейным перемещением, используют многооборотные энкодеры. В них есть дополнительный передаточный механизм, благодаря чему они регистрируют, помимо угла поворота, количество оборотов.
Оптические энкодеры
Диск оптического энкодера изготавливают из стекла. Отличие этого типа угловых датчиков, в наличии оптического растора, перемещающегося при вращении вала. При этом он создает поток света, который регистрирует фотодатчик.

Каждому положению энкодера соответствует определенный цифровой код, который вместе с количеством оборотов составляет единицу измерения устройства.
Оптические угловые датчики бывают фотоэлектрическими и магнитными.
В основе работающих датчиков лежит магнитный эффект Холла. Их точность и разрешение ниже, однако, и конструкция проще. Они лучше переносят сложные условия работы и занимают меньше места.
Фотоэлектрические датчики основаны на том же принципе. В них свет преобразуется в электрические сигналы.
Механические энкодеры
Также называются аналоговыми. Их диск изготавливают из диэлектрика и наносят на него выпуклые или непрозрачные области. Набор контактов и переключателей, позволяет вычислить значение абсолютного угла. Механические энкодеры также используют код Грея.
Один из недостатков этих энкодеров в том, что со временем контакты разбалтываются. В результате сигнал искажается, и прибор выдает неточные значения. А это сказывается на общей работоспособности. Оптические и магнитные энкодеры не имеют такого недостатка.
Монтаж и подключение датчиков поворота
Как правило, энкодеры устанавливают на валах, с которых нужно считывать информацию. Чтобы компенсировать различия в размерах, используют переходные муфты. Важно прочно закрепить корпус датчика при монтаже.
Чаще всего угловые энкодеры работают вместе с контроллерами. Преобразователь подключают к нужным выходам. Затем программа определяет положение объекта в текущий момент, его скорость и ускорение.
Варианты подключения
В самом простом варианте, энкодер подключают к счетчику, запрограммированному измерять скорость.
Однако чаще работа энкодера осуществляется вместе с контроллером. Примером служат датчики поворота на валах двигателей, совмещающих какие-либо детали между собой. С помощью вычислений на основе поступающих данных, система отслеживает зазор между деталями. Когда достигнуто некоторое минимальное значение, совмещение деталей останавливается, чтобы их не повредить.
Другой случай — подключение энкодеров на двигателях с частотными преобразователями, где они служат элементами обратной связи. Здесь принцип того, как подключить устройство, еще проще. Датчик угла поворота подключается к ним с помощью платы сопряжения. Это позволяет точно поддерживать скорость и момент двигателя.
При использовании самодельного энкодера, сделанного своими руками, способ подключения может быть другим. Желательно проверить оба перечисленных варианта, доведя устройство до исправной работы.
Читайте также:
- Не работает спидометр крайслер
- Где находится предохранитель прикуривателя форд фокус 2
- Дэу матиз не работает прикуриватель
- Стоит ли менять лонжероны на ваз
- Почему не работает твиттер автозвук
Изучаем что такое энкодеры
Энкодер — это специальный датчик для измерения характеристик вращения каких-либо объектов. Другое название приборов — датчики угла поворота.
Эти устройства фиксируют параметры вращения и преобразуют их в последовательность электрических сигналов. Характеристики этих сигналов определяются значением угла поворота.
Характеристики
Основная характеристика датчиков поворота — разрядность. Разрядность энкодера — это количество импульсов за один оборот. Ее также называют разрешением. Как правило, разрешение составляет 1024 за один оборот.
Другие конструктивные и функциональные особенности этих приборов:
- тип вала — пустой или с прямой осью;
- размеры отверстия и вала;
- рабочее напряжение;
- размеры корпуса прибора;
- способы выхода;
- разрядность (количество бит);
- сигнал на выходе;
- есть энкодер с кнопкой;
- длина кабеля и тип разъема;
- способ крепления.
Где применяют энкодеры
На вопрос, что это за устройство такое — энкодер, можно ответить перечислением того, где используют данные приборы. Сферы применения угловых датчиков зависят от их сложности и способности выдерживать нагрузки.
Датчики поворота используют наиболее часто на станкостроительных заводах, в системах точного перемещения, робототехнических комплексах, в измерительных устройствах, где требуется точная фиксация поворотов, наклонов, вращений.
В промышленности и сложных механизмах, используют высокопроизводительные энкодеры, устойчивые к тепловому воздействию и взрывам.
Другие области и механизмы, в которых применяют эти датчики:
- в печатной промышленности: устройства устанавливают на валах, по которым движется бумага;
- в автомобилестроении: с их помощью определяют угол поворота колес (иногда взаимодействуют с движками);
- на металлообрабатывающих предприятиях для контроля вращения валов с металлическими лентами;
- в химической и пищевой промышленности: на оборудовании автоматизированной фасовки;
- в электротехнике.
Пример использования прибора есть почти в каждом современном доме. Это обычная компьютерная мышь, в которой также установлен такой датчик.
Общие плюсы и минусы
Прежде, чем рассмотреть разные типы энкодеров, стоит сказать об общих преимуществах и недостатках этих датчиков.
- Доступная цена.
- Простой монтаж и использование.
- Высокая точность измерений.
- Универсальность — возможность применения на широком спектре приборов и оборудования.
- Возможность определить направление вращения объекта.
- Возможные ошибки в измерениях, если выбран прибор неправильного типа или нарушена технология установки.
- Схема подключения зависит от типа и сферы применения.
- В некоторых видах энкодеров нужно постоянно преобразовывать код Грея.
- Ограниченная разрешающая способность. Чтобы повысить точность измерений, нужно добавлять дополнительные каналы.
Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
Инкрементальные энкодеры
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.
Этот вид работает следующим образом. У него есть начальная нуль-метка, или выход Z, и два дополнительных выхода — A и B. Датчик создает две линии сигналов со смещенными на четверть фазы импульсами относительно друг друга. Разница импульсов указывает на направление вращения, а их количество — на угол поворота.
Разновидность инкрементальных энкодеров — сдвоенные, или квадратурные. Они состоят из двух датчиков, которые срабатывают со смещением в полшага. Квадратурные считают количество импульсов и учитывают направление.
У инкрементальных два главных минуса. Во-первых, нужно постоянно обрабатывать и анализировать сигнал, для чего используют контроллер и специальную программу. Во-вторых, они требуют синхронизации с нулевой меткой после включения. Для этого требуется инициализация для поиска выхода Z.
Абсолютные энкодеры
Датчики такого типа устроены более сложно. Но они позволяют определить величину угла поворота сразу после включения, не требуя синхронизации с нулевой меткой.
В основе конструкции поворотный круг, разделенный на одинаковые по размеру пронумерованные секторы. После включения устройства определяется номер сектора, на котором оно находится. Такое решение позволяет сразу зафиксировать положение, угол и направление вращения.
Принцип работы абсолютного энкодера основан на использовании кода Грея для определения текущего положения и других параметров. В них не требуется синхронизация с нулевым значением.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Многооборотные датчики поворота
Абсолютные энкодеры могут быть однооборотными и многооборотными.
Однооборотные показывают абсолютное значение после одного оборота. После этого код возвращается к начальному значению. Такие датчики используют в основном для измерения угла поворота.
Если нужно измерять обороты в системах с линейным перемещением, используют многооборотные энкодеры. В них есть дополнительный передаточный механизм, благодаря чему они регистрируют, помимо угла поворота, количество оборотов.
Оптические энкодеры
Диск оптического энкодера изготавливают из стекла. Отличие этого типа угловых датчиков, в наличии оптического растора, перемещающегося при вращении вала. При этом он создает поток света, который регистрирует фотодатчик.
Каждому положению энкодера соответствует определенный цифровой код, который вместе с количеством оборотов составляет единицу измерения устройства.
Оптические угловые датчики бывают фотоэлектрическими и магнитными.
В основе работающих датчиков лежит магнитный эффект Холла. Их точность и разрешение ниже, однако, и конструкция проще. Они лучше переносят сложные условия работы и занимают меньше места.
Фотоэлектрические датчики основаны на том же принципе. В них свет преобразуется в электрические сигналы.
Механические энкодеры
Также называются аналоговыми. Их диск изготавливают из диэлектрика и наносят на него выпуклые или непрозрачные области. Набор контактов и переключателей, позволяет вычислить значение абсолютного угла. Механические энкодеры также используют код Грея.
Один из недостатков этих энкодеров в том, что со временем контакты разбалтываются. В результате сигнал искажается, и прибор выдает неточные значения. А это сказывается на общей работоспособности. Оптические и магнитные энкодеры не имеют такого недостатка.
Монтаж и подключение датчиков поворота
Как правило, энкодеры устанавливают на валах, с которых нужно считывать информацию. Чтобы компенсировать различия в размерах, используют переходные муфты. Важно прочно закрепить корпус датчика при монтаже.
Чаще всего угловые энкодеры работают вместе с контроллерами. Преобразователь подключают к нужным выходам. Затем программа определяет положение объекта в текущий момент, его скорость и ускорение.

Варианты подключения
В самом простом варианте, энкодер подключают к счетчику, запрограммированному измерять скорость.
Однако чаще работа энкодера осуществляется вместе с контроллером. Примером служат датчики поворота на валах двигателей, совмещающих какие-либо детали между собой. С помощью вычислений на основе поступающих данных, система отслеживает зазор между деталями. Когда достигнуто некоторое минимальное значение, совмещение деталей останавливается, чтобы их не повредить.
Другой случай — подключение энкодеров на двигателях с частотными преобразователями, где они служат элементами обратной связи. Здесь принцип того, как подключить устройство, еще проще. Датчик угла поворота подключается к ним с помощью платы сопряжения. Это позволяет точно поддерживать скорость и момент двигателя.
При использовании самодельного энкодера, сделанного своими руками, способ подключения может быть другим. Желательно проверить оба перечисленных варианта, доведя устройство до исправной работы.
После подключения желательно проверить все мультиметром.
Магнитные угловые энкодеры

Магнитный энкодер использует тот же принцип для определения положения, что и оптический энкодер, но вместо света использует магнитные поля.
Магнитные угловые энкодеры
Сердцем энкодера является способ предоставления информации — это технология энкодера. Электроника и механизм энкодера принимают информацию о положении и скорости, а затем передают сигнал, который отправляется в систему управления.
Технология классифицируется по методу определения управляющей информации. Существуют две основные категории:
• Технология оптических энкодеров, как с маской, так и фазированной матрицей
Различия в способе получения информации магнитным и оптическим энкодерах приводят к различиям в производительности в разных операционных средах. Понимание того, как работают оптический и магнитный энкодеры, может помочь определить, какой датчик лучше всего подходит для вашего применения.
Технология магнитного энкодера
Оптический энкодер использует свет (оптику) для идентификации уникальных положений датчика. Магнитный энкодер использует тот же принцип для определения положения, что и оптический энкодер, но вместо света использует магнитные поля.
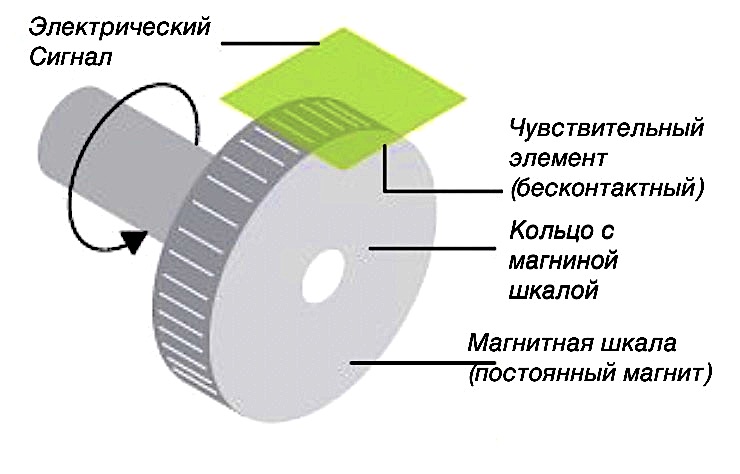
В магнитном датчике большое намагниченное колесо или постоянный цилиндрический магнит (магнитный актуатор) вращается под пластиной магниторезистивных чувствительных элементов. Так же, как оптический диск вращается под маской, пропуская свет сквозь определенные штрихи (растры), магнитное колесо или актуатор вызывает определенные реакции магнито чувствительного элемента в зависимости от силы магнитного поля. Магнитная реакция передается через электрическую цепь формирования сигнала.
Количество пар намагниченных полюсов на колесе, количество чувствительных элементов и тип электрической цепи определяют разрешающую способность магнитного энкодера.
Основой к использованию магнетизма в качестве элемента для получения сигнала является то, что на него не влияют очень сложные окружающие условия, включая пыль, влажность, экстремальные температуры и встряски.
Применение магнитных энкодеров
Магнитный энкодер разработан для обеспечения надежной цифровой обратной связи в самых суровых и жестких условиях эксплуатации. Сферы применения данной технологии, как правило, требуют широкого температурного диапазона, высокой устойчивости к ударам и вибрации, надежного уплотнения и защиты от загрязнений, при этом должны быть обеспечены высокая надежность выходного сигнала, простота установки и снижение времени простоев оборудования из-за неисправностей. Популярные сферы, в которых магнитные энкодеры используются для получения обратной связи по положению и скорости — сталелитейные, целлюлозно-бумажные и деревообрабатывающие комбинаты, краново-подъемное оборудование, морское оборудование, строительная и горнодобывающая техника.