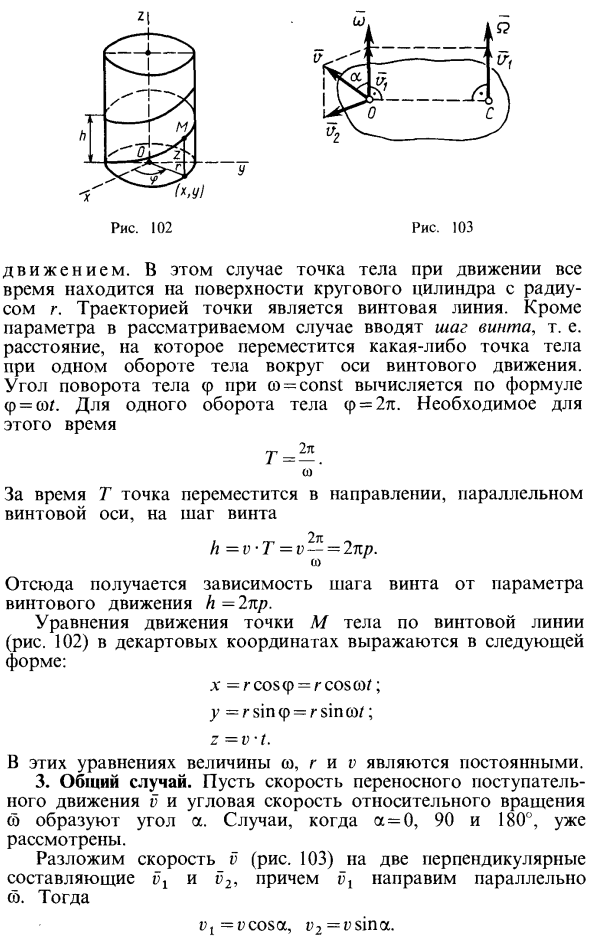
Качение колеса как суперпозиция поступательного и вращательного движений
Для кинематического описания вращения твердого тела удобно использовать угловые величины: угловое перемещение , угловую скорость
и угловое ускорение
В этих формулах углы выражаются в радианах . При вращении твердого тела относительно неподвижной оси все его точки движутся с одинаковыми угловыми скоростями и одинаковыми угловыми ускорениями. За положительное направление вращения обычно принимают направление против часовой стрелки.
Вращение диска относительно оси, проходящей через его центр
При малых угловых перемещениях модуль вектора линейного перемещения некоторого элемента массы вращающегося твердого тела выражается соотношением:
| , |
где – модуль радиус-вектора (рис. 1.23.1). Отсюда следует связь между модулями линейной и угловой скоростей:
| , |
и между модулями линейного и углового ускорения:
| . |
Векторы и направлены по касательной к окружности радиуса . Следует вспомнить, что при движении тела по окружности возникает также нормальное или центростремительное ускорение, модуль которого есть
Разобьем вращающееся тело на малые элементы . Расстояния до оси вращения обозначим через , модули линейных скоростей – через . Тогда кинетическую энергию вращающегося тела можно записать в виде:
Физическая величина зависит от распределения масс вращающегося тела относительно оси вращения. Она называется моментом инерции тела относительно данной оси:
В пределе при эта сумма переходит в интеграл. Единица измерения момента инерции в СИ – килограмм-метр в квадрате (кг∙м 2 ) . Таким образом, кинетическую энергию твердого тела, вращающегося относительно неподвижной оси, можно представить в виде
Эта формула очень похожа на выражение для кинетической энергии поступательно движущегося тела только теперь вместо массы в формулу входит момент инерции , а вместо линейной скорости – угловая скорость .
Момент инерции в динамике вращательного движения играет ту же роль, что и масса тела в динамике поступательного движения. Но есть и принципиальная разница. Если масса – внутреннее свойство данного тела, не зависящее от его движения, то момент инерции тела зависит от того, вокруг какой оси оно вращается. Для разных осей вращения моменты инерции одного и того же тела различны.
Во многих задачах рассматривается случай, когда ось вращения твердого тела проходит через его центр массы . Положение , центра масс для простого случая системы из двух частиц с массами и , расположенными в плоскости в точках с координатами , и , (рис. 1.23.2), определяется выражениями:
Центр масс системы из двух частиц
В векторной форме это соотношение принимает вид:
Аналогично, для системы из многих частиц радиус-вектор центра масс определяется выражением
Для сплошного тела суммы в выражении для заменяются интегралами. Легко видеть, что в однородном поле тяготения центр масс совпадает с центром тяжести . Если в однородном поле тяготения твердое тело сложной формы подвесить за центр масс, то оно будет находиться в безразличном состоянии равновесия. Поэтому положение центра масс тела сложной формы можно практически определить путем последовательного подвешивания его за несколько точек и отмечая по отвесу вертикальные линии (рис. 1.23.3).
Определение положения центра масс тела сложной формы. , , точки подвеса
Равнодействующая сил тяжести в однородном поле тяготения приложена к центру масс тела. Если тело подвешено за центр масс, то оно находится в состоянии безразличного равновесия (см. §1.14).
Любое движение твердого тела можно представить как сумму двух движений: поступательного движения со скоростью центра масс тела и вращения относительно оси, проходящей через центр масс. Примером может служить колесо, которое катится без проскальзывания по горизонтальной поверхности (рис. 1.23.4). При качении колеса все его точки движутся в плоскостях, параллельных плоскости рисунка. Такое движение называется плоским .
При плоском движении кинетическая энергия движущегося твердого тела равна сумме кинетической энергии поступательного движения и кинетической энергии вращения относительно оси, проходящей через центр масс тела и перпендикулярной плоскостям, в которых движутся все точки тела:
где – полная масса тела, – момент инерции тела относительно оси, проходящей через центр масс.
Качение колеса как сумма поступательного движения со скоростью и вращения с угловой скоростью относительно оси , проходящей через центр масс
В механике доказывается теорема о движении центра масс: под действием внешних сил центр масс любого тела или системы взаимодействующих тел движется как материальная точка, в которой сосредоточена вся масса системы .
Иллюстрацией этого утверждения может служить рис. 1.23.5, на котором изображено движение тела под действием силы тяжести. Центр масс тела движется по параболической траектории как материальная точка, в то время как все другие точки движутся по более сложным траекториям.
Движение твердого тела под действием силы тяжести
Если твердое тело вращается относительно некоторой неподвижной оси, то его момент инерции можно выразить через момент инерции этого тела относительно оси, проходящей через центр масс тела и параллельной первой.
К доказательству теоремы о параллельном переносе оси вращения
Рассмотрим сечение твердого тела произвольной формы, изображенное на рис. 1.23.6. Выберем координатную систему с началом координат в центре масс тела. Пусть одна из осей вращения проходит через центр масс , а другая через произвольную точку , расположенную на расстоянии от начала координат. Обе оси перпендикулярны плоскости чертежа. Пусть – некоторый малый элемент массы твердого тела. По определению момента инерции:
Выражение для можно переписать в виде:
Модель. Момент инерции
На рис. 1.23.7 изображены однородные твердые тела различной формы и указаны моменты инерции этих тел относительно оси, проходящей через центр масс.
Моменты инерции некоторых однородных твердых тел
Второй закон Ньютона может быть обобщен на случай вращения твердого тела относительно неподвижной оси. На рис. 1.23.8 изображено некоторое твердое тело, вращающееся относительно оси, перпендикулярной плоскости рисунка и проходящей через точку . Выделим произвольный малый элемент массы . На него действуют внешние и внутренние силы. Равнодействующая всех сил есть Ее можно разложить на две составляющие: касательную составляющую и радиальную Радиальная составляющая создает центростремительное ускорение .
Касательная и радиальная составляющие силы действующей на элемент твердого тела
Касательная составляющая вызывает тангенциальное ускорение массы . Второй закон Ньютона, записанный в скалярной форме, дает
| , |
где – угловое ускорение всех точек твердого тела.
Если обе части написанного выше уравнения умножить на , то мы получим:
Здесь – плечо силы – момент силы.
Теперь нужно аналогичные соотношения записать для всех элементов массы вращающегося твердого тела, а затем просуммировать левые и правые части. Это дает:
Стоящая в правой части сумма моментов сил, действующих на различные точки твердого тела, состоит из суммы моментов всех внешних сил и суммы моментов всех внутренних сил.
Это и есть основное уравнение динамики вращательного движения твердого тела . Угловое ускорение и момент сил в этом уравнении являются величинами алгебраическими. Обычно за положительное направление вращения принимают направление против часовой стрелки.
Возможна и векторная форма записи основного уравнения динамики вращательного движения, при которой величины определяются как векторы, направленные по оси вращения.
При изучении поступательного движения тел вводится понятие импульса тела (см. §1.16). Аналогично, при изучении вращательного движения вводится понятие момента импульса .
Поскольку уравнение вращательного движения можно представить в виде:
Окончательно будем иметь:
Это уравнение, полученное здесь для случая, когда , справедливо и в общем случае, когда момент инерции тела изменяется в процессе движения.
Если суммарный момент внешних сил, действующих на тело, равен нулю, то момент импульса относительно данной оси сохраняется:
| . |
Это и есть закон сохранения момента импульса . Иллюстрацией этого закона может служить неупругое вращательное столкновение двух дисков, насажанных на общую ось (рис. 1.23.9).
Неупругое вращательное столкновение двух дисков. Закон сохранения момента импульса:
Закон сохранения момента импульса справедлив для любой замкнутой системы тел. Он выполняется, например, при движении планет по эллиптическим орбитам вокруг Солнца (второй закон Кеплера).
Уравнение вращательного движения тела можно записывать не только относительно неподвижной или равномерно движущейся оси, но и относительно оси, движущейся с ускорением.
Основное уравнение динамики вращательного движения не изменяет своего вида и в случае ускоренно движущихся осей при условии, что ось вращения проходит через центр массы тела и что ее направление в пространстве остается неизменным. Примером может служить качение тела (обруч, цилиндр, шар) по наклонной плоскости с трением (рис. 1.23.10).
Качение симметричного тела по наклонной плоскости
Ось вращения проходит через центр масс тела. Моменты силы тяжести и силы реакции относительно оси равны нулю. Момент создает только сила трения: .
Уравнение вращательного движения:
где – угловое ускорение катящегося тела, – линейное ускорение его центра масс, – момент инерции относительно оси , проходящей через центр масс.
Второй закон Ньютона для поступательного движения центра масс записывается в виде:
| . |
Исключая из этих уравнений , получим окончательно:
Из этого выражения видно, что быстрее будет скатываться с наклонной плоскости тело, обладающее меньшим моментом инерции. Например, у шара а у сплошного однородного цилиндра Следовательно, шар будет скатываться быстрее цилиндра.
| Новостройка от застройщика в Брянске |
| у нас? Потому что цена ниже застройщика! Звони |
| atmosfera32.ru |
Качение колеса как суперпозиция поступательного и вращательного движений
Плоское движение — это такое движение твердого тела, при котором траектории всех его точек лежат в параллельных плоскостях. Если в теле провести некоторую прямую O1O2, перпендикулярную этим плоскостям (рис. 1.9), то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями ; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, или, как его иногда называют, плоско-параллельном, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
| Рис. 1.9. |
Обратимся к классическому простому примеру плоского движения — качению цилиндра по плоскости без проскальзывания. Рассматривая одно из сечений цилиндра плоскостью, перпендикулярной его оси, мы придем к известное задаче о катящемся колесе (рис. 1.10). Центр колеса движется прямолинейно, траектории других точек представляют собой кривые, называемые циклоидами .
| Рис. 1.10. |
При отсутствии проскальзывания мгновенная скорость самой нижней точки колеса (точки M) равна нулю. Это позволяет рассматривать качение колеса как суперпозицию двух движений: поступательного со скоростью оси и вращательного с угловой скоростью где — радиус колеса. Ясно, что в этом случае
Попробуем обобщить этот прием на произвольное плоское движение.
Выделим отрезок АB в рассматриваемом сечении твердого тела (рис. 1.11). Перевод сечения из положения 1 в положение 2 можно рассматривать как суперпозицию двух движений: поступательного из 1 в 1′ и вращательного из 1′ в 2 вокруг точки A’, называемой обычно полюсом (рис. 1.11а). Существенно, что в качестве полюса можно выбрать любую точку, принадлежащую сечению или даже лежащую в плоскости сечение вне его. На рис. 1.11б, к примеру, в качестве полюса выбрана точка В. Обратите внимание: длина пути при поступательном перемещении изменилась (в данном случае увеличилась), но угол поворота остался прежним!
| Рис. 1.11. |
Приближая конечное положение тела к начальному (сокращая рассматриваемый промежуток времени), приходим к выводу: плоское движение твердого тела в любой момент времени можно представить как суперпозицию поступательного движения со скоростью некоторой точки, выбранной в качестве полюса, и вращения вокруг оси, проходящей через полюс. В реальной ситуации оба эти движения, естественно, происходят одновременно. Существенно, что разложение на поступательное и вращательное движения оказывается неоднозначным, причем в зависимости от выбора полюса скорость поступательного движения будет изменяться, а угловая скорость вращения останется неизменной.
В соответствии со сказанным скорость любой точки А тела (рис. 1.12) геометрически складывается из скорости какой-либо другой точки O, принятой за полюс, и скорости вращательного движения вокруг этого полюса. Напомним, что система координат XYZ на рис. 1.12 — неподвижная (лабораторная); начало системы x0y0z0 помещено в некоторую точку О тела (полюс), а сама система x0y0z0 движется относительно XYZ поступательно, причем так, что оси Oy0 и Oz0 остаются в плоскости рисунка. Рассматриваемая точка А тела также движется в плоскости рисунка (плоское движение!).
| Рис. 1.12. |
Радиус-вектор точки А
Скорость точки А
Из (1.16) можно сделать вывод, что в любой момент времени должна существовать такая точка M, скорость которой в лабораторной системе XYZ равна нулю — для этой точки
(рис. 1.13). Заметим, что эта точка не обязательно должна принадлежать телу, то есть может находиться и вне его. Таким образом, плоское движение твердого тела в данный момент времени можно представить как чистое вращение вокруг оси, проходящей через точку M — такая ось называется обычно мгновенной осью вращения. В частности, для колеса, катящегося по плоскости без проскальзывания (рис. 1.10), мгновенная ось вращения проходит через точку М соприкосновения колеса с плоскостью.
| Рис. 1.13. |
Существенно, что в разные моменты времени мгновенная ось вращения проходит через разные точки твердого тела и через разные точки лабораторной системы XYZ, сохраняя, конечно, свою ориентацию в пространстве.
Для того, чтобы определить положение мгновенной оси вращения, необходимо знать скорости каких-либо двух точек твердого тела. Так, на рис. 1.14 показано положение мгновенной оси вращения (точка М) для цилиндра, зажатого между двумя параллельными рейками, которые движутся в одну и ту же сторону с разными скоростями и
| Рис. 1.14. |
В ситуации, изображенной на рис. 1.15, стержень AB опирается на точку С и движется в плоскости чертежа так, что его конец B все время находится на полуокружности CBD При этом мгновенная ось вращения стержня (точка М) находится на верхней полуокружности CMD и при движении точки B вправо перемещается по дуге этой полуокружности влево.
| Рис. 1.15. |
В случае, показанном на рис. 1.16, стержень, опирающийся одним из своих концов на гладкую горизонтальную плоскость, начинает падать из вертикального положения. При этом центр масс стержня опускается, оставаясь на одной и той же вертикали. Мгновенная ось вращения (точка М) перемещается по дуге окружности радиуса ( — длина стержня).
| Рис. 1.16. |
Зная угловую скорость и положение мгновенной оси вращения, можно легко определить скорость любой точки тела при его плоском движении. Так, в случае колеса, катящегося по плоскости со скоростью без проскальзывания (рис. 1.17), скорость точки В
вектор перпендикулярен отрезку в МВ, соединяющему точку В с точкой М, через которую проходит мгновенная ось вращения. Естественно, можно представить и как геометрическую сумму двух скоростей: — скорости поступательного движения оси колеса и — скорости вращательного движения вокруг этой оси, причем (рис. 1.17).
| Рис. 1.17. |
Рис. 1.18 иллюстрирует распределение скоростей на вертикальном диаметре колеса железнодорожного вагона. Мгновенная ось вращения проходит через точку М соприкосновения колеса с рельсом. Хорошо видно, что линейная скорость точки на краю реборды направлена в сторону, противоположную движению вагона.
| Рис. 1.18. |
Определим теперь ускорения точек тела при плоском движении. Дифференцируя выражением (1.16) по времени, получим для ускорения точки А
Это ускорение складывается из трех частот (рис. 1.19): ускорения точки O, принятой за полюс, тангенциального ускорения
и нормального ускорения
(скалярное произведение равно нулю, так как ).
| Рис. 1.19. |
Таким образом, ускорение любой точки А тела при плоском движении равно геометрической сумме ускорения точки, принятой за полюс, и ускорения точк, принятой за полюс, и ускорения точки A за счет ее вращения вокруг этого полюса. Отсюда, в частности, следует, что ускорение любой точки колеса, катящегося без проскальзывания по плоскости с постоянной скоростью , направлено к центру колеса и равно где — расстояние рассматриваемой точки до центра колеса. В этом примере в качестве полюса удобно выбрать центр колеса О, тогда и остается только
Замечание. По аналогии с мгновенной осью вращения можно ввести мгновенную ось, ускорения всех точек которой в данный момент времени равны нулю. При этом следует иметь в виду, что эта ось, вообще говоря, не совпадает с мгновенной осью вращения. Так, в примере с колесом, катящимся по плоскости с постоянной скоростью, она проходит через центр колеса.
Учебник. Вращение твердого тела
Для кинематического описания вращения твердого тела удобно использовать угловые величины: угловое перемещение Δφ, угловую скорость ω ω = Δ φ Δ t ; ( Δ t → 0 ) , и угловое ускорение ε ε = Δ ω Δ t ; ( Δ t → 0 ) .
В этих формулах углы выражаются в радианах. При вращении твердого тела относительно неподвижной оси все его точки движутся с одинаковыми угловыми скоростями и одинаковыми угловыми ускорениями. За положительное направление вращения обычно принимают направление против часовой стрелки.
При малых угловых перемещениях Δφ модуль вектора Δ s → линейного перемещения некоторого элемента массы Δm вращающегося твердого тела выражается соотношением: Δs = rΔφ, где r – модуль радиус-вектора r → (рис. 1.23.1). Отсюда следует связь между модулями линейной и угловой скоростей: υ = rω, и между модулями линейного и углового ускорения: a = aτ = rε.
Векторы υ → и a → = a → τ направлены по касательной к окружности радиуса r. Следует вспомнить, что при движении тела по окружности возникает также нормальное или центростремительное ускорение, модуль которого есть a n = υ 2 r = ω 2 r .
Разобьем вращающееся тело на малые элементы Δmi. Расстояния до оси вращения обозначим через ri, модули линейных скоростей – через υi. Тогда кинетическую энергию вращающегося тела можно записать в виде: E k = ∑ i Δ m υ i 2 2 = ∑ i Δ m ( r i ω ) 2 2 = ω 2 2 ∑ i Δ m i r i 2 .
Физическая величина ∑ i Δ m i r i 2 зависит от распределения масс вращающегося тела относительно оси вращения. Она называется моментом инерции I тела относительно данной оси: I = ∑ i Δ m i r i 2 .
В пределе при Δm → 0 эта сумма переходит в интеграл. Единица измерения момента инерции в СИ – килограмм-метр в квадрате (кгċм 2 ). Таким образом, кинетическую энергию твердого тела, вращающегося относительно неподвижной оси, можно представить в виде E k = I ω 2 2 .
Эта формула очень похожа на выражение для кинетической энергии поступательно движущегося тела m υ 2 2 , только теперь вместо массы m в формулу входит момент инерции I, а вместо линейной скорости υ – угловая скорость ω.
Момент инерции в динамике вращательного движения играет ту же роль, что и масса тела в динамике поступательного движения. Но есть и принципиальная разница. Если масса – внутреннее свойство данного тела, не зависящее от его движения, то момент инерции тела зависит от того, вокруг какой оси оно вращается. Для разных осей вращения моменты инерции одного и того же тела различны.
Во многих задачах рассматривается случай, когда ось вращения твердого тела проходит через его центр массы. Положение xC, yC центра масс для простого случая системы из двух частиц с массами m1 и m2, расположенными в плоскости XY в точках с координатами x1, y1 и x2, y2 (рис. 1.23.2), определяется выражениями: x C = m 1 x 1 + m 2 x 2 m 1 + m 2 ; y C = m 1 y 1 + m 2 y 2 m 1 + m 2 .
В векторной форме это соотношение принимает вид: r → C = m 1 r → 1 + m 2 r → 2 m 1 + m 2 .
Аналогично, для системы из многих частиц радиус-вектор r → C центра масс определяется выражением r → C = ∑ m i r → i ∑ m i .
Для сплошного тела суммы в выражении для r → C заменяются интегралами. Легко видеть, что в однородном поле тяготения центр масс совпадает с центром тяжести. Если в однородном поле тяготения твердое тело сложной формы подвесить за центр масс, то оно будет находиться в безразличном состоянии равновесия. Поэтому положение центра масс тела сложной формы можно практически определить путем последовательного подвешивания его за несколько точек и отмечая по отвесу вертикальные линии (рис. 1.23.3).
Равнодействующая сил тяжести в однородном поле тяготения приложена к центру масс тела. Если тело подвешено за центр масс, то оно находится в состоянии безразличного равновесия (см. §1.14).
Любое движение твердого тела можно представить как сумму двух движений: поступательного движения со скоростью центра масс тела и вращения относительно оси, проходящей через центр масс. Примером может служить колесо, которое катится без проскальзывания по горизонтальной поверхности (рис. 1.23.4). При качении колеса все его точки движутся в плоскостях, параллельных плоскости рисунка. Такое движение называется плоским.
При плоском движении кинетическая энергия движущегося твердого тела равна сумме кинетической энергии поступательного движения и кинетической энергии вращения относительно оси, проходящей через центр масс тела и перпендикулярной плоскостям, в которых движутся все точки тела: E k = m υ C 2 2 + I C ω 2 2 , где m – полная масса тела, IC – момент инерции тела относительно оси, проходящей через центр масс.
В механике доказывается теорема о движении центра масс: под действием внешних сил центр масс любого тела или системы взаимодействующих тел движется как материальная точка, в которой сосредоточена вся масса системы.
Иллюстрацией этого утверждения может служить рис. 1.23.5, на котором изображено движение тела под действием силы тяжести. Центр масс тела движется по параболической траектории как материальная точка, в то время как все другие точки движутся по более сложным траекториям.
Если твердое тело вращается относительно некоторой неподвижной оси, то его момент инерции I можно выразить через момент инерции IC этого тела относительно оси, проходящей через центр масс тела и параллельной первой.
Рассмотрим сечение твердого тела произвольной формы, изображенное на рис. 1.23.6. Выберем координатную систему XY с началом координат O в центре масс C тела. Пусть одна из осей вращения проходит через центр масс C, а другая через произвольную точку P, расположенную на расстоянии d от начала координат. Обе оси перпендикулярны плоскости чертежа. Пусть Δmi – некоторый малый элемент массы твердого тела. По определению момента инерции: I C = ∑ Δ m i ( x i 2 + y i 2 ) , I P = ∑ Δ m i | ( x i — a ) 2 + ( y i — b ) 2 | .
Выражение для IP можно переписать в виде: I P = ∑ Δ m i ( x i 2 + y i 2 ) + ∑ Δ m i ( a 2 + b 2 ) — 2 a ∑ Δ m i x i — 2 b ∑ Δ m i y i .
Поскольку начало координат совпадает с центром масс C, последние два члена обращаются в нуль. Это следует из определения центра масс. Следовательно, IP = IC + md 2 , где m – полная масса тела. Этот результат называют теоремой Штейнера (теоремой о параллельном переносе оси вращения).
На рис. 1.23.7 изображены однородные твердые тела различной формы и указаны моменты инерции этих тел относительно оси, проходящей через центр масс.
Второй закон Ньютона может быть обобщен на случай вращения твердого тела относительно неподвижной оси. На рис. 1.23.8 изображено некоторое твердое тело, вращающееся относительно оси, перпендикулярной плоскости рисунка и проходящей через точку O. Выделим произвольный малый элемент массы Δmi. На него действуют внешние и внутренние силы. Равнодействующая всех сил есть F → i . Ее можно разложить на две составляющие: касательную составляющую F → i τ и радиальную F → ir . Радиальная составляющая F → ir создает центростремительное ускорение an.
Касательная составляющая F → i τ вызывает тангенциальное ускорение a → i τ массы Δmi. Второй закон Ньютона, записанный в скалярной форме, дает Δmiaiτ = Fiτ = Fi sin θ или Δmiriε = Fi sin θ, где ε = a i τ r i – угловое ускорение всех точек твердого тела.
Если обе части написанного выше уравнения умножить на ri, то мы получим: Δ m i r i 2 ε = F i r i sin θ = F i l i = M i .
Здесь l i – плечо силы F → i , M i – момент силы.
Теперь нужно аналогичные соотношения записать для всех элементов массы Δmi вращающегося твердого тела, а затем просуммировать левые и правые части. Это дает: ∑ Δ m i r i 2 ε = ∑ M i .
Стоящая в правой части сумма моментов сил, действующих на различные точки твердого тела, состоит из суммы моментов всех внешних сил и суммы моментов всех внутренних сил. ∑ M = ∑ ( M i внешн ) + ∑ ( M i внутр ) .
Но сумма моментов всех внутренних сил согласно третьему закону Ньютона равна нулю, поэтому в правой части остается только сумма моментов всех внешних сил, которые мы будем обозначать через M. В итоге: Iε = M.
Это и есть основное уравнение динамики вращательного движения твердого тела. Угловое ускорение ε и момент сил M в этом уравнении являются величинами алгебраическими. Обычно за положительное направление вращения принимают направление против часовой стрелки.
Возможна и векторная форма записи основного уравнения динамики вращательного движения, при которой величины M → определяются как векторы, направленные по оси вращения.
При изучении поступательного движения тел вводится понятие импульса тела p → (см. §1.16). Аналогично, при изучении вращательного движения вводится понятие момента импульса.
Моментом импульса вращающегося тела называют физическую величину, равную произведению момента инерции тела I на угловую скорость ω его вращения. Момент импульса обозначается буквой L: L = Iω.
Поскольку ε = Δ ω Δ t ; ( Δ t → 0 ) , уравнение вращательного движения можно представить в виде: M = I ε = I Δ ω Δ t или M Δ t = I Δ ω = Δ L .
Окончательно будем иметь: M = Δ L Δ t ; ( Δ t → 0 ) .
Это уравнение, полученное здесь для случая, когда I = const, справедливо и в общем случае, когда момент инерции тела изменяется в процессе движения.
Если суммарный момент M внешних сил, действующих на тело, равен нулю, то момент импульса L = Iω относительно данной оси сохраняется: ΔL = 0, если M = 0.
Следовательно, L = Iω = const.
Это и есть закон сохранения момента импульса. Иллюстрацией этого закона может служить неупругое вращательное столкновение двух дисков, насажанных на общую ось (рис. 1.23.9).
Закон сохранения момента импульса справедлив для любой замкнутой системы тел. Он выполняется, например, при движении планет по эллиптическим орбитам вокруг Солнца (второй закон Кеплера).
Уравнение вращательного движения тела можно записывать не только относительно неподвижной или равномерно движущейся оси, но и относительно оси, движущейся с ускорением.
Основное уравнение динамики вращательного движения не изменяет своего вида и в случае ускоренно движущихся осей при условии, что ось вращения проходит через центр массы тела и что ее направление в пространстве остается неизменным. Примером может служить качение тела (обруч, цилиндр, шар) по наклонной плоскости с трением (рис. 1.23.10).
Ось вращения O проходит через центр масс тела. Моменты силы тяжести m g → и силы реакции N → относительно оси O равны нулю. Момент M создает только сила трения: M = FтрR.
Уравнение вращательного движения: I C ε = I C a R = M = F тр R , где ε – угловое ускорение катящегося тела, a – линейное ускорение его центра масс, IC – момент инерции относительно оси O, проходящей через центр масс.
Второй закон Ньютона для поступательного движения центра масс записывается в виде: ma = mg sin α – Fтр.
Исключая из этих уравнений Fтр, получим окончательно: a = m g sin θ ( I C R 2 + m ) .
Из этого выражения видно, что быстрее будет скатываться с наклонной плоскости тело, обладающее меньшим моментом инерции. Например, у шара I C = 2 5 m R 2 , а у сплошного однородного цилиндра I C = 1 2 m R 2 . Следовательно, шар будет скатываться быстрее цилиндра.
Качение колеса как суперпозиция поступательного и вращательного движений
Мы изучили несколько простейших моделей движения. Сейчас постараемся показать, как из этих простых движение можно «конструировать» более сложные и красивые движения. Слово «суперпозиция» обозначает сложение, наложение, сочетание — оно очень часто используется в физике. Возможность такого наложения различных видов движения обусловлена возможностью описывать его в различных системах отсчета и переходить из одной системы в другую по формулам \(
\vec r = \vec r_0 + \vec r\,’\) . Теперь мы можем задавать независимо закон движения в подвижной системе отсчета \(
\vec r\,'(t)\), закон движения самой движущейся системы \(
\vec r_0(t)\) и получать более сложный закон движения. Далее может быть, что и неподвижная система отсчета движется относительно другой «еще более неподвижной» системы, тем самым добавляется еще одно слагаемое и т.д. На этом пути открываются практически неограниченные возможности, рассмотреть их всех невозможно, поэтому мы вынуждены ограничиться несколькими простыми, но красивыми движениями.
Движение тела, брошенного под углом к горизонту можно представить в виде суперпозиции равномерного движения вдоль горизонтальной оси и равноускоренного движения вдоль вертикальной оси. Такой «суперпозиции» можно придать наглядный смысл: пусть в вагоне равномерно и прямолинейно движущегося поезда вверх подброшен небольшой шарик. В системе отсчета, связанной с вагоном, шарик движется вдоль вертикальной прямой с постоянным ускорением свободного падения. А в системе отсчета, связанной с землей, движение шарика будет движением по описанной ранее параболе. Отметим также, что «разложение движения на составляющие» не является однозначным [1] . Так то же движение тела, брошенного под углом к горизонту, можно представить в виде «суммы» равномерного движения вдоль прямой направленной под углом к горизонту, задаваемой вектором начальной скорости, и равноускоренного движения вдоль вертикальной прямой. Фактически эти разложения мы использовали ранее при описании этого движения.
Суперпозиция вращательного и поступательного движений.
Пусть материальная точка А движется по прямому стержню с постоянной скоростью V, а стержень вращается вокруг оси с постоянной угловой скоростью ω. Совместим начало системы отсчета с осью вращения (рис. 28). Тогда расстояние от точки А до начала отсчета и угол поворота стержня зависят от времени по законам l = Vt , α = ωt.
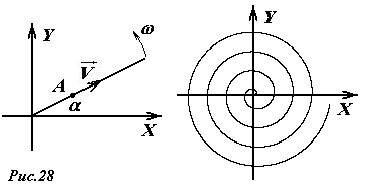
Зависимость декартовых координат точки от времени имеет вид
\begin x = l \cos \alpha = Vt \cos \omega t \\ y = l \sin \alpha = Vt \sin \omega t \end \) .
и описывает движение по спирали.
Еще одна суперпозиция поступательного и вращательного движений.
Пусть колесо радиуса R катится по горизонтальной поверхности без проскальзывания. Точка А расположена на расстоянии a от оси колеса (будем считать, что a может быть как меньше, так и больше R — такие точки можно найти, например, на железнодорожном колесе). Построим семейство траекторий точек колеса.
Пусть в начальный момент времени центр колеса находится в точке O, введем систему координат, ось X которой проходит вдоль поверхности, по которой катится колесо, а ось Y перпендикулярна этой поверхности и проходит через точку O (рис. 29).
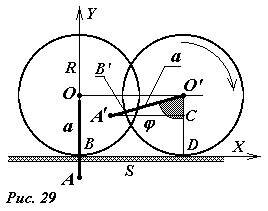
Выберем точку А на расстоянии a от центра и первоначально находящуюся на оси Y. Посмотрим как изменится положение этой точки, когда колесо повернется на некоторый угол φ = ωt (на рис. это ∠A’O’D’). Центр колеса сместится на расстояние S и займет положение O’, а точка А окажется в точке А’. Так как движение происходит без проскальзывания, то смещение колеса S = |OO’| = |BD| будет равно длине дуги DB’. Поэтому S = Rφ , где угол φ, естественно, измеряется в радианах. Координаты центра колеса будут равны \(
x_ = S = R \varphi ; y_ = R\) . Рассматривая треугольник O’A’C’ , легко найти координаты рассматриваемой точки А’:
\begin x = R \varphi — a \sin \varphi = R \omega t — a \sin \omega t \\ y = R — a \cos \varphi = R — a \cos \omega t \end \) .
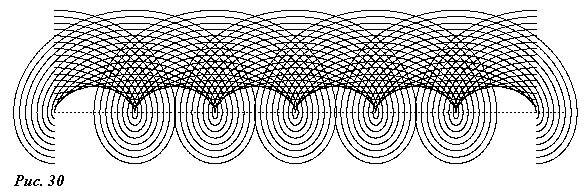
Посмотрите на эти траектории (рис.30) при a, изменяющемся от -3R до 3R (с шагом R/4). Не правда ли, эффектные кривые!
Суперпозиция двух вращательных движений.
Посмотрим, какую траекторию описывает точка M колеса радиуса r, катящегося без скольжения по другой неподвижной окружности радиуса R (рис. 31).
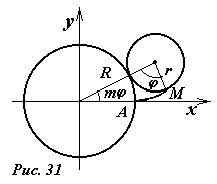
Обозначим φ = ωt — угол поворота колеса, \(
m = \frac \) отношение радиусов колеса и неподвижной окружности. Пусть A — начальное положение рассматриваемой точки. Из геометрических соображений можно получить параметрическое уравнение траектории точки M:
\begin x = (R +r ) \cos m \varphi — r \cos (\varphi + m \varphi) \\ y = (R +r ) \sin m \varphi — r \sin (\varphi + m \varphi) \end \) .
Вид траектории полностью определяется параметром m. Если этот параметр является рациональным числом \(
\) , (p, q — целые числа), то траектория является замкнутой.
Посмотрите на различные траектории, описываемые этими уравнениями (рис. 32). На всех рисунках — в центре изображение той окружности, по которой катится колесо.
6.Плоское движение твердого тела.
Плоское движение — это такое движение твердого тела, при котором траектории всех его точек лежат в параллельных плоскостях. Если в теле провести некоторую прямую O1O2, перпендикулярную этим плоскостям (рис. 1.9), то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, или, как его иногда называют, плоско-параллельном, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
Обратимся к классическому простому примеру плоского движения — качению цилиндра по плоскости без проскальзывания. Рассматривая одно из сечений цилиндра плоскостью, перпендикулярной его оси, мы придем к известное задаче о катящемся колесе (рис. 1.10). Центр колеса движется прямолинейно, траектории других точек представляют собой кривые, называемые циклоидами.
При отсутствии проскальзывания мгновенная скорость самой нижней точки колеса (точки M) равна нулю. Это позволяет рассматривать качение колеса как суперпозицию двух движений: поступательного со скоростью оси и вращательного с угловой скоростью где — радиус колеса. Ясно, что в этом случае
Попробуем обобщить этот прием на произвольное плоское движение.
Выделим отрезок АB в рассматриваемом сечении твердого тела (рис. 1.11). Перевод сечения из положения 1 в положение 2 можно рассматривать как суперпозицию двух движений: поступательного из 1 в 1′ и вращательного из 1′ в 2 вокруг точки A’, называемой обычно полюсом (рис. 1.11а). Существенно, что в качестве полюса можно выбрать любую точку, принадлежащую сечению или даже лежащую в плоскости сечение вне его. На рис. 1.11б, к примеру, в качестве полюса выбрана точка В. Обратите внимание: длина пути при поступательном перемещении изменилась (в данном случае увеличилась), но угол поворота остался прежним!
Приближая конечное положение тела к начальному (сокращая рассматриваемый промежуток времени), приходим к выводу: плоское движение твердого тела в любой момент времени можно представить как суперпозицию поступательного движения со скоростью некоторой точки, выбранной в качестве полюса, и вращения вокруг оси, проходящей через полюс. В реальной ситуации оба эти движения, естественно, происходят одновременно. Существенно, что разложение на поступательное и вращательное движения оказывается неоднозначным, причем в зависимости от выбора полюса скорость поступательного движения будет изменяться, а угловая скорость вращения останется неизменной.
7.Преобразование скорости и ускорения при переходе к другой системе отсчета.
Преобразова́ния Галиле́я — в классической механике (механике Ньютона) преобразования координат и времени при переходе от одной инерциальной системы отсчета (ИСО) к другой [1] . Термин был предложен Филиппом Франком в 1909 году. [2] Преобразования Галилея подразумевают одинаковость времени во всех системах отсчета («абсолютное время» [3] ) и выполнение принципа относительности (принцип относительности Галилея (см. ниже)).
Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для скоростей, малых по сравнению со скоростью света в пустоте. Для скоростей вплоть до порядка скоростей движения планет в Солнечной системе (и даже бо́льших), преобразования Галилея приближенно верны с очень большой точностью.
Вид преобразований при коллинеарных осях [4]
Если ИСО S движется относительно ИСО S’ с постоянной скоростью  вдоль оси
вдоль оси  , а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:
, а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:




или, используя векторные обозначения,

(последняя формула остается верной для любого направления осей координат).
Как видим, это просто формулы для сдвига начала координат, линейно зависящего от времени (подразумеваемого одинаковым для всех систем отсчета).
Из этих преобразований следуют соотношения между скоростями движения точки и её ускорениями в обеих системах отсчета:



Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для малых скоростей (много меньше скорости света).
[править] Формула преобразования скоростей

Достаточно продифференцировать в формуле преобразований Галилея, приведенной выше, и сразу же получится приведенная в том же параграфе рядом формула преобразования скорости.
Приведем более элементарный, но и более общий вывод — для случая произвольного движения начала отсчета одной системы относительно другой (при отсутствии вращения). Для такого более общего случая, можно получить формулу преобразования скоростей, например, так.

Рассмотрим преобразование произвольного сдвига начала отсчета на вектор ,

где радиус-вектор какого-то тела A в системе отсчета K обозначим за , а в системе отсчета K’ — за ,

подразумевая, как всегда в классической механике, что время t в обеих системах отсчета одно и то же, а все радиус-векторы зависят от этого времени: .
Тогда в любой момент времени

и в частности, учитывая

,



— средняя скорость тела A относительно системы K;

— средняя скорость тела А относительно системы K’ ;

— средняя скорость системы K’ относительно системы K.

Если то средние скорости совпадают с мгновенными:


— как для средних, так и для мгновенных скоростей (формула сложения скоростей).
Таким образом, скорость тела относительно неподвижной системы координат равна векторной сумме скорости тела относительно движущейся системы координат и скорости системы отсчета относительно неподвижной системы отсчета. Аналогично можно получить формулу преобразования ускорений при переходе из одной системы координат в другую, верную при условии, что эти системы движутся поступательно друг относительно друга:
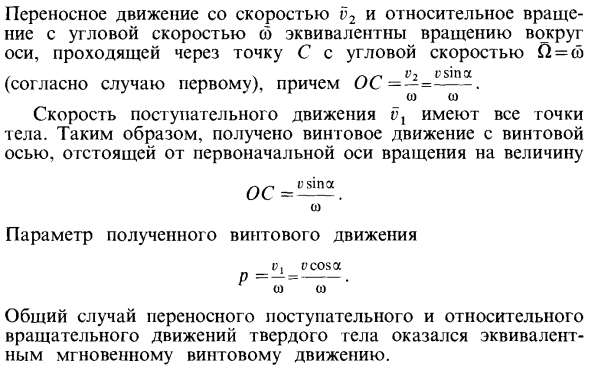
Сложение поступательного и вращательного движений
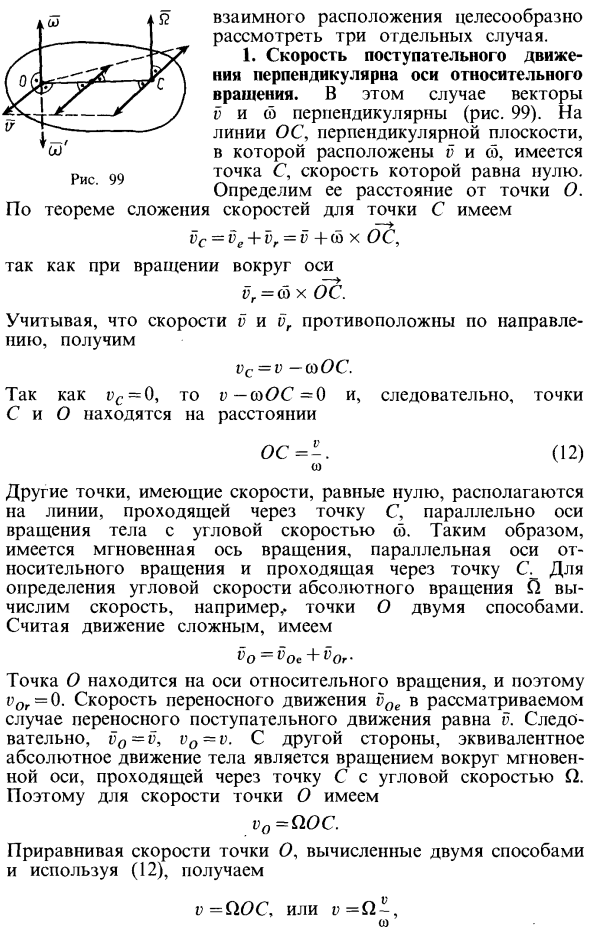

Определить расстояние от точки О. По теореме сложения скорости в точке C ys = pe + yy = y + (5x OS, При вращении вокруг оси т, = х х ОС. Если направления скорости v и v противоположны, vc = v -aOS. Поскольку t> c = 0, v-aOC = 0, то точка C и точка O разнесены ОС = ^. (12) Другая точка со скоростью, равной нулю, находится на прямой, проходящей через точку C, параллельной оси вращения объекта с угловой скоростью ω. Следовательно, существует ось мгновенного вращения, которая параллельна оси относительного вращения и проходит через точку C. Например, для определения угловой скорости абсолютного вращения the скорость в точке О рассчитывается двумя способами.
Учитывая, что движение сложное, Йо = йо + йог- Поскольку точка O находится на оси относительного вращения, o0r = 0. Скорость мобильного перемещения vOe, когда рассматривается мобильный перевод, равна v. Следовательно, v0 = v, v0 = v. С другой стороны, эквивалентным абсолютным движением тела является вращение вокруг мгновенной оси, проходящей через точку C с угловой скоростью r. Так что для скорости точки O, йо = QOC. Рассчитывается двумя способами и с использованием (12) для выравнивания скорости точки O: v = ClOC или «= th-, или th = y.
Вращение вокруг мгновенной оси требует направления, в котором скорость точки О совпадает со скоростью V. Отсюда получаем совпадение направления вращения относительного вращения и абсолютного вращения. Следовательно, 0 = th. Таким образом, когда добавляется твердое поступательное и относительное вращательное движение, где поступательная скорость перпендикулярна относительной оси вращения, эквивалентное абсолютное движение представляет собой мгновенную ось, параллельную относительной оси вращения с угловой скоростью, которая соответствует относительной угловой скорости вращения.
- Того же результата можно достичь, выбрав и заменив трансляцию скорости v на пару оборотов (© ‘, Q). Поскольку (r ‘, r) coO, два поворота с угловыми скоростями r’ и r можно отбросить, а абсолютное движение — это вращение с угловой скоростью R = r. Скорость перевода равна паре вращательных моментов. Если они равны, u = o> OS или OS = ^, Матчи (12). Рассматривая перевод вектора движущейся угловой скорости из точки в точку O, получается другая интерпретация рассматриваемого случая. Поступательное ур и относительное вращение с осью вращения, перпендикулярной скорости удельного движения, разрешает плоское движение твердого тела.
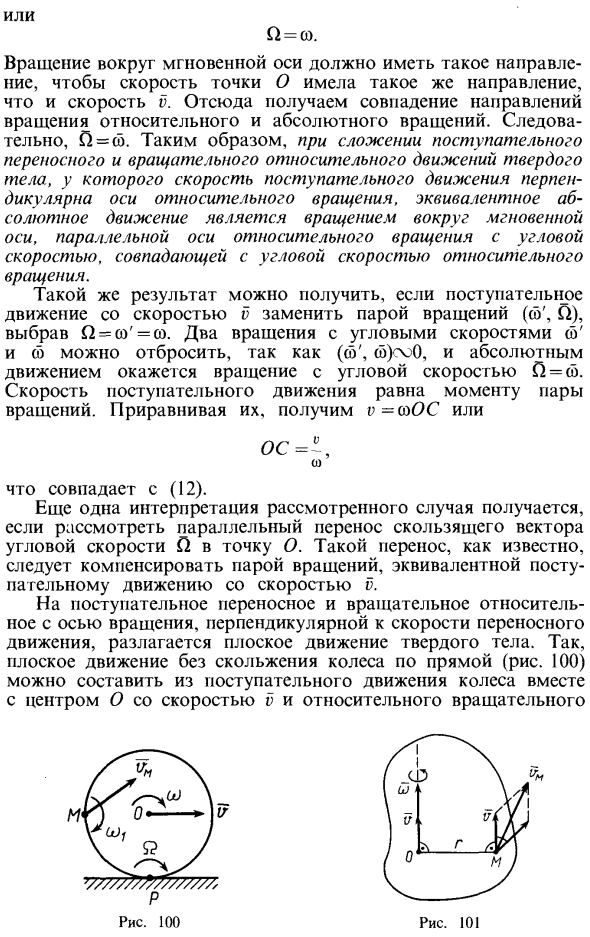
Следовательно, плоское движение, которое не скользит колесом по прямой (рис. 100), может состоять из поступательного движения колеса вместе со скоростью O и центром O с относительным вращением. Рисунок 100 Рисунок 101 Вокруг оси, проходящей через точку О с угловой скоростью ω. Это же движение можно представить как вращение вокруг мгновенной оси через MSC, которое совпадает с точкой P. Угловая скорость этого абсолютного вращения равна L = ω и имеет то же направление вращения, что и ось вокруг точки O. Если точка O используется в качестве другой точки на колесе, например, точка M, изменится только скорость переносного перевода.
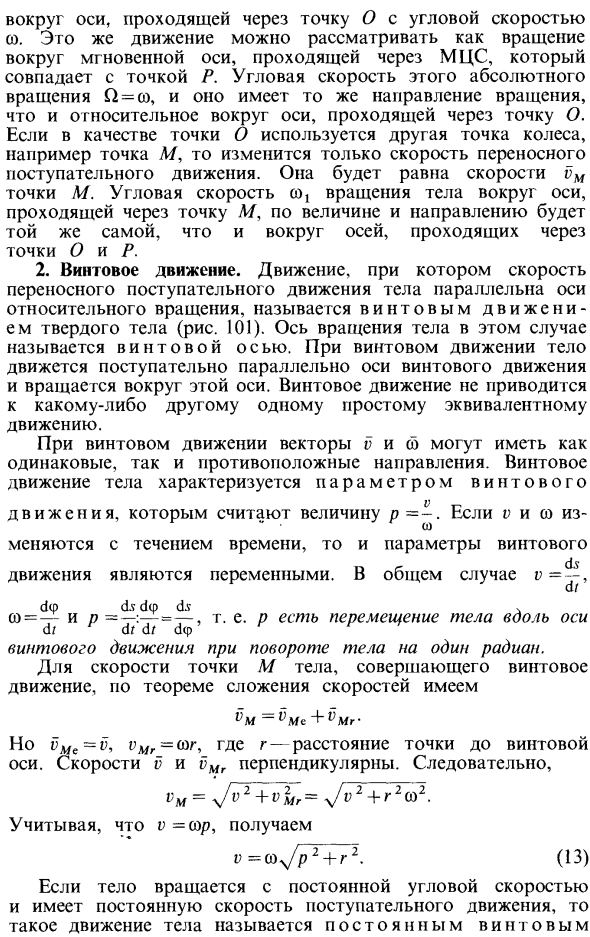
Это равно скорости точки М vM. Угловая скорость C0j вращения объекта вокруг оси, проходящей через точку M, имеет ту же величину и направление, что и вокруг оси, проходящей через точки O и P. 2. Винтовое движение. Движение, при котором поступательная поступательная скорость тела параллельна оси относительного вращения, называется твердым спиральным движением (рис. 101). Ось вращения тела в этом случае называется винтовой осью. Во время спирального движения тело постепенно перемещается параллельно оси спирального движения и вращается вокруг этой оси. Спиральное движение не сводится к другим простым эквивалентным движениям. При спиральном движении векторы v и co могут иметь как одинаковые, так и противоположные направления.
Спиральное движение тела характеризуется параметрами спирального движения и считается p =
Относительное вращение переносного движения со скоростью u2 и угловой скоростью ω соответствует вращению вокруг оси через точку C, где угловая скорость = = (согласно первому случаю). Скорость перевода vt имеет все точки тела. Таким образом, спиральная ось отстоит от первоначальной оси вращения, что приводит к спиральному движению. ОС = -. Получены параметры спирального движения Было обнаружено, что общий случай переносного поступательного и относительного вращательного движения эквивалентен мгновенному спиральному движению.
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.


https://amdy.su/wp-admin/options-general.php?page=ad-inserter.php#tab-8
Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Уравнения моментов поступательного и вращательного движения
Механической системой материальных точек называется совокупность материальных точек, каким-то образом связанных межу собой.
Всякое твердое тело можно считать неизменяемой механической системой материальных точек. Силы взаимодействия точке данной системы называются внутренними силами; силы, с которыми действуют на данную систему другие точки, не входящие в эту систему, — внешними.
Пусть твердое тело массой m движется под действием силы F поступательно с ускорением а (рис. 1) .
Разобьем тело на ряд материальных точек с массами m1 и применим принцип Даламбера, не забывая при этом, что внутренние силы в уравнение равновесия не входят, так как на основании третьего закона Ньютона их сумма для системы в целом равна нулю.
В каждой материальной точке приложим силу инерции Fi ин = — mia и составим уравнение равновесия:
ΣX = 0 ; F – ΣFi ин = 0 ,
Так как при поступательном движении все точки тела имеют одинаковые ускорения, то а можно вынести за знак суммы, т. е.
Согласно второму закону Ньютона векторы силы F и ускорения а совпадают по направлению, поэтому можно записать:
Это и есть уравнение поступательного движения твердого тела. Очевидно, что это уравнение ничем не отличается от основного уравнения динамики точки, следовательно, все формулы динамики точки применимы для тела, движущегося поступательно.
Уравнение вращательного движения твердого тела
Пусть твердое тело под действием системы сил вращается вокруг неподвижной оси z с угловым ускорением α (рис. 2) .
Разобьем тело на ряд материальных точек с массами mi и применим, как и в предыдущем случае, принцип Даламбера (Д’Аламбера).
К каждой материальной точке приложены касательная и нормальная силы инерции. Составим уравнение равновесия:
Моменты реакций подшипника и подпятника, а также сил Fτi ин относительно оси z равны нулю, так как линии действия этих сил пересекают ось; сумма моментов внешних сил относительно оси вращения называется вращающим моментом .
Тогда
Выражение Σ(miri 2 ) называют моментом инерции тела относительно оси и обозначают J :
Момент инерции тела относительно оси есть сумма произведений масс материальных точек, составляющих это тело, на квадрат расстояния от них до этой оси.
В результате получим формулу:
которая называется уравнением вращательного движения твердого тела. В этой формуле J – момент инерции тела относительно оси вращения.
Единица момента инерции — [J] = [mr 2 ] = [m][r 2 ] = кг×м 2 .
Момент инерции играет во вращательном движении такую же роль, какую масса играет в поступательном движении, т. е. момент инерции есть мера инертности вращающегося тела.
В качестве примера определим момент инерции тонкого однородного сплошного диска, радиус которого R , толщина s , масса m , относительно оси, перпендикулярной плоскости диска и проходящей через его центр О (см. рис 3) .
Разобьем диск на элементарные кольца переменного радиуса r , шириной dr и толщиной s . Согласно определению момент инерции такого кольца равен
dJ = dΣ(mir 2 ) = r 2 dΣmi = r 2 dm = r 2 2πr drsρ = 2πsρ r 3 dr ,
где ρ – плотность материала диска.
Просуммировав моменты инерции всех элементарных колец, получим момент инерции всего диска:
J = ∫ 2πsρ r 3 dr = 2πsρ ∫ r 3 dr = 2πsρ r 4 /4 = πsρ r 4 /2 .
Так как масса диска m = πr 2 sρ , то можно записать: J = mR 2 /2 .
Нетрудно понять, что момент инерции однородного сплошного прямоугольного кругового цилиндра радиусом R и массой m любой высоты определяют по такой же формуле. Чтобы убедиться в этом, достаточно мысленно разбить цилиндр плоскостями, параллельными основанию на тонкие диски, и просуммировать моменты инерции всех дисков.
Моменты инерции тел вращения
На основе теоретических выкладок, изложенных выше, мы установили, что момент инерции круглого диска и цилиндрического тела можно определить по формуле
Аналогичные формулы можно вывести для определения моментов инерции других геометрических тел, наиболее часто встречающихся при расчетах и решении задач технической механики.
Моменты инерции для некоторых других однородных тел можно определить по формулам, которые приводятся здесь без вывода.
Шар массой m , радиусом R относительно диаметра:
Тонкий стержень массой m , длиной l относительно оси, проходящей перпендикулярно стержню через его конец:
Тонкая сферическая оболочка массой m , радиусом R относительно диаметра:
Пустотелый вал массой m , наружным радиусом R и радиусом отверстия r относительно оси:
Момент инерции Jz тела относительно какой-либо оси z , параллельной центральной (т. е. проходящей через центр тяжести С тела), равен сумме центрального момента инерции Jc и произведения массы m тела на квадрат расстояния а между этими осями:
Из этой формулы (ее вывод здесь не приводится) следует, что из всех моментов инерции тела относительно параллельных осей наименьшим будет момент инерции относительно центральной оси , т. е. центральный момент инерции.
Иногда момент инерции определяют по формуле: J = mrи 2 , где rи – радиус инерции тела :
Физический смысл радиуса инерции следующий: если массу тела сосредоточить в одной точке (такая масса называется приведенной) и поместить ее от оси вращения на расстоянии, равном радиусу инерции, то момент инерции приведенной массы будет равен моменту инерции данного тела относительно той же оси.
Удвоенный радиус инерции тела называется диаметром инерции : Dи = 2rи .
В практике иногда вместо момента инерции пользуются понятием махового момента GDи 2 .
Маховым моментом называется произведение силы тяжести G вращающегося тела на квадрат его диаметра инерции.
Единица махового момента — Н×м 2 .
Между маховым моментом и моментом инерции существует простая зависимость:
GDи 2 = 4g J = 39,24 J .
Кинетическая энергия твердого тела
Кинетическая энергия твердого тела равна сумме кинетических энергий материальных точек, составляющих данное тело:
Определим выражения для кинетической энергии твердого тела для трех случаев движения.
Тело движется поступательно
Учитывая, что при поступательном движении тела все его точки имеют одинаковую траекторию и одинаковые скорости, можно записать:
Следовательно, при поступательном движении твердого тела его кинетическая энергия вычисляется по той же формуле, что и кинетическая энергия материальной точки.
Тело вращается вокруг неподвижной оси
Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси, равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости.
Тело движется плоскопараллельно
Как известно из кинематики, сложное плоскопараллельное движение твердого тела в каждый данный момент времени можно считать простейшим вращательным движением вокруг мгновенной оси (метод мгновенных центров скоростей) .
Допустим, что известна скорость vс центра тяжести тела, тогда мгновенная угловая скорость
где ОС – расстояние центра тяжести С тела от мгновенной оси вращения О .
Момент инерции Jо относительно мгновенной оси вращения определяют по формуле:
где Jс — момент инерции относительно центральной оси или центральный момент инерции.
Кинетическую энергию тела, движущегося плоскопараллельно, определяют следующим образом:
Кпп = Jоω 2 /2 = (Jс + mОС 2 ) ω 2 /2 = (Jсω 2 )/2 + mOC 2 /2×vс 2 /ОС 2 ,
Кинетическая энергия твердого тела, движущегося плоскопараллельно, равна сумме кинетических энергий в поступательном движении вместе с центром тяжести и вращательном движении вокруг центральной оси, перпендикулярной основной плоскости.
В заключение сформулируем теорему об изменении кинетической энергии системы тел:
Изменение кинетической энергии системы тел при некотором перемещении равно алгебраической сумме работ всех внешних (активных и реактивных) и внутренних сил, действовавших на систему при указанном перемещении:
Кинетическая энергия системы тел равна сумме кинетических энергий каждого тела в отдельности.
Если тело твердое, то сумма работ его внутренних сил равна нулю. При некоторых связях, называемых идеальными, работа реактивных сил тоже будет равна нулю.
Уравнения моментов поступательного и вращательного движения
При поступательном движении все точки тела получают за один и тот же промежуток времени равные по величине и направлению перемещения, поэтому скорости и ускорения всех точек в каждый момент времени оказываются одинаковыми. Поэтому достаточно определить движение одной из точек тела (например, его центра инерции) для того, чтобы полностью охарактеризовать его движение.
При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Для описания вращательного движения нужно задать положение в пространстве оси вращения и угловую скорость тела в каждый момент времени.
Любое движение твердого тела может быть представлено как суперпозиция двух вышеуказанных основных видов движения. Покажем это на примере плоского движения, при котором все точки тела перемещаются в параллельных плоскостях. Таким образом, например, происходит качение цилиндра по плоскости. Элементарное перемещение какой-либо точки тела можно разложить на два — «поступательное» и «вращательное»:
причем для всех точек тела одно и то же. Разделив на соответствующий промежуток времени dt, получим скорость точки:
где — одинаковая для всех точек тела скорость поступательного движения и — различная для разных точек тела скорость вращательного движения.
Линейная скорость точки с радиус-вектором , обусловленная вращением твердого тела, равна:
Следовательно, скорость этой точки при сложном движении тела имеет значение:
1.5.2. Движение центра инерции
(центра масс) твердого тела
Разбив тело на элементарные массы Δmi, можно представить его как систему МТ, взаимное расположение которых остается неизменным. Любая из этих элементарных масс может находиться под воздействием внутренних и внешних сил. Напишем для каждой элементарной массы уравнение второго закона Ньютона:
где — результирующие всех внутренних и всех внешних сил, действующих на данную элементарную массу. Суммируя, для всех элементарных масс имеем:
Однако сумма всех внутренних сил, действующих в системе, равна нулю. Поэтому (1.5.5) можно упростить так:
Используя определение центра инерции, можно записать:
Дифференцируя (1.5.7) дважды по времени, можно получить:
Подставляя (1.5.8) в (1.5.6), имеем:
Следовательно, центр инерции твердого тела движется так, как двигалась бы МТ с массой, равной массе тела, под действием всех приложенных к телу сил.
1.5.3. Момент силы
Рассмотрим схему установки на Рис. 1.5.1.
Рис. 1.5.1. Схема установки для исследования
равно-ускоренного вращательного движения
Под действием груза Р крестовина будет вращаться с возрастающей угловой скоростью, и вращение будет равно-ускоренным. Варьируя величину груза Р, радиус шкива l, массу грузов m и их расстояние R от оси вращения, можно прийти к заключению, что угловое ускорение β:
- прямо пропорционально натяжению нити f и радиусу шкива l;
- обратно пропорционально массе грузов m и квадрату их расстояния R от оси вращения.
Следовательно, ускорение вращательного движения зависит не только от величины действующей на тело силы, но и от расстояния l от оси вращения до линии, вдоль которой действует сила. Произведение fl дает величину так называемого момента силы относительно оси вращения.
Из этого опыта следует также, что на величину углового ускорения влияет не только масса вращающегося тела, но и распределение массы относительно оси вращения. Величина, которая это учитывает, называется моментом инерции тела относительно оси вращения.
Моментом силы относительно некоторой точки О называется величина , равная векторному произведению:
где — радиус-вектор, проведенный из точки О в точку приложения силы (Рис. 1.5.2).
Рис. 1.5.2. К определению момента силы
Вектор , по определению, перпендикулярен плоскости векторов и и направлен от нас. Это — аксиальный вектор. Модуль вектора равен:
где α — угол между направлениями векторов и , а l = r sinα — длина перпендикуляра, опущенного из точки О на прямую, вдоль которой действует сила. Эта длина называется плечом силы относительно точки О.
Если можно представить силу в виде суммы сил, имеющих общую точку приложения , то формулу (1.5.10) можно записать так:
Парой сил называются две равные по величине и противоположно направленные силы, не действующие вдоль одной и той же прямой (Рис. 1.5.3). Расстояние l между прямыми, вдоль которых действуют силы, называется плечом пары сил .
Рис. 1.5.3. Момент пары сил
Покажем, что момент пары сил относительно любой точки будет один и тот же. Пусть точка лежит в плоскости, в которой действуют силы, и выполняется . Момент силы равен fl1 и направлен к наблюдателю, момент силы равен fl2 и направлен от наблюдателя. Результирующий момент силы направлен от наблюдателя и равен:
Полученное выражение не зависит от положения точки О на плоскости, в которой лежит пара сил.
Суммарный момент внутренних сил Силы, с которыми взаимодействуют друг с другом две любые элементарные массы, лежат на одной и той же прямой (Рис. 1.5.4).
Рис. 1.5.4. Момент внутренних сил
Их моменты относительно произвольной точки О равны по величине и противоположны по направлению. Поэтому моменты внутренних сил попарно уравновешивают друг друга, и сумма моментов всех внутренних сил для любой системы МТ, в частности, для твердого тела, всегда равна нулю.
1.5.4. Момент импульса материальной точки.
Закон сохранения момента импульса
Аналогично моменту силы введем момент импульса МТ относительно некоторой точки О:
где — радиус-вектор, проведенный из точки О в точку пространства, в которой находится МТ (Рис. 1.5.5).
Рис. 1.5.5. К определению момента импульса
Введя плечо l = rsinα, можно получить модуль вектора момента импульса в виде:
Продифференцируем (1.5.16) по времени:
Первое слагаемое равно нулю в силу того, что оно представляет собой векторное произведение векторов одинакового направления: . Вектор . Поэтому соотношение (1.5.17) можно переписать так:
где — момент приложенных к МТ сил, взятый относительно той же точки О, относительно которой рассчитан момент импульса . Для замкнутой системы из N материальных точек легко получить аналогичное (1.5.18) соотношение. В отсутствие или при взаимной компенсации внешних сил их суммарный момент , действующий на тела системы, равен нулю. В результате этого суммарный момент импульса не зависит от времени. Таким образом, формулируется закон сохранения момента импульса : момент импульса замкнутой системы материальных точек остается постоянным.
1.5.5. Уравнение динамики
вращательного движения
Если МТ вращается по окружности радиуса r (Рис.1.5.6), то момент ее импульса относительно оси вращения О равен:
Рис. 1.5.6. К выводу уравнения динамики вращательного двмжения
Пусть ω — угловая скорость вращения, тогда v = ωr, и (1.5.18) будет иметь вид:
Если вокруг оси О вращается система МТ с одной и той же угловой скоростью ω, то:
где, момент инерции системы МТ относительно оси вращения, равный сумме произведений масс МТ на квадраты их расстояний до оси вращения.
Если угловая скорость и момент инерции — переменные величины, то, подставляя (1.5.21) в (1.5.18), получим:
где М — момент внешних сил относительно оси вращения. Соотношение (1.5.22) — это основное уравнение динамики вращательного движения вокруг неподвижной оси.
Важным частным случаем является вращение неизменяемой системы МТ или твердого тела вокруг неподвижной оси. В этом случае момент инерции I остается постоянным при вращении, и уравнение (1.5.22) будет иметь вид:
Сопоставляя уравнения динамики вращательного движения с уравнениями динамики поступательного движения, легко заметить, что при вращательном движении роль силы исполняет момент силы, роль массы — момент инерции и т д. (Табл. 1.5.1).
| — сила | — момент силы |
| — масса | — момент инерции |
| — линейная скорость | — угловая скорость |
| — линейная скорость | — угловая скорость |
| — линейное ускорение | — угловое ускорение |
| — импульс | — момент импульса |
Предположим, что твердое тело может изменять свою конфигурацию в результате перераспределения масс. Пусть в результате происходит изменение момента инерции от значения I1 до I2. Если такое перераспределение осуществляется при отсутствии моментов внешних сил, то согласно закону сохранения момента импульса должно выполняться равенство:
где ω1 — исходное, а ω2 — конечное значение угловой скорости тела. Следовательно, изменение момента инерции влечет за собой соответственное изменение угловой скорости тела. Этим объясняется такое явление: человек, стоящий на вертящейся скамье, разводя руки в стороны, начинает вращаться медленнее, а, прижимая руки к туловищу, будет вращаться быстрее.
1.5.6. Момент инерции. Теорема Штайнера
Из определения момента инерции:
следует, что момент инерции — величина аддитивная. Это означает, что момент инерции тела равен сумме моментов инерции его частей. Каждое тело, независимо от того, вращается оно или покоится, обладает определенным моментом инерции.
Распределение массы в пределах тела можно охарактеризовать с помощью физической величины, называемой плотностью. Если тело однородно, то его плотность может быть вычислена так:
где m — масса, V — объем тела. Для тела с неравномерно распределенной массой соотношение (1.5.26) дает среднюю плотность. Плотность в данной точке определяется в этом случае так:
Уменьшение объема в (1.5.27) следует производить до тех пор, пока не будет получен физически бесконечно малый объем, который достаточно мал, чтобы в его пределах макроскопические свойства вещества можно было считать одинаковыми, и достаточно велик, чтобы не могла проявиться дискретность (атомарное строение) вещества.
Согласно (1.5.27), элементарная масса тела может быть вычислена так:
Следовательно, момент инерции следует записать в виде:
Если плотность постоянна, ее можно вынести за знак суммы:
Устремляя ΔVi к нулю, можно в (1.5.30) перейти к интегрированию:
В качестве примера найдем момент инерции однородного диска относительно оси, перпендикулярной к плоскости диска и проходящей через его центр (Рис. 1.5.7).
Рис. 1.5.7. К расчету момента инерции диска
Разобьем диск на кольцевые слои толщиной dr. Все точки одного слоя будут находиться на одинаковом расстоянии от оси, равном r. Объем такого слоя равен:
где b — толщина диска. Поскольку диск однороден, плотность можно вынести за знак интеграла:
где R0 — радиус диска. Применяя обозначение для массы диска , получим для момента инерции однородного диска:
В данном случае вычисление момента инерции упрощалось благодаря однородности и симметричности тела. Если бы нужно было отыскать момент инерции относительно оси О’О’ (Рис. 1.5.7), перпендикулярной к диску и проходящей через его край, вычисления оказались бы значительно сложнее. В таких случаях отыскание момента инерции облегчается, если воспользоваться теоремой Штайнера : момент инерции I относительно произвольной оси равен сумме момента инерции I C относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между осями:
В соответствии с теоремой Штайнера момент инерции диска относительно оси О’О’ равен:
1.5.7. Работа и кинетическая энергия
вращающегося твердого тела
Если МТ вращается по окружности с радиусом r, то элементарная работа при повороте на угол dφ равна:
Такое же выражение получится и для твердого тела, так как его можно рассматривать как систему МТ, вращающихся с общей угловой скоростью ω. Роль силы в (1.5.37) играет момент внешних сил, роль линейного перемещения — угловой поворот.
Кинетическая энергия твердого тела, вращающегося с угловой скоростью ω, может быть записана так:
Это выражение напоминает соответствующую формулу для кинетической энергии МТ и может быть получено из нее формальной заменой m → I, v → ω.
© ФГОУ ВПО Красноярский государственный аграрный университет, 2013
Поступательное и вращательное движение
Движение твердого тела разделяют на виды:
- поступательное;
- вращательное по неподвижной оси;
- плоское;
- вращательное вокруг неподвижной точки;
- свободное.
Первые два из них – простейшие, а остальные представляют как комбинацию основных движений.
Поступательное криволинейное движение. Угол поворота тела
Поступательным называют движение твердого тела, при котором любая прямая, проведенная в нем, двигается, оставаясь параллельной своему начальному направлению.
Прямолинейное движение является поступательным, но не всякое поступательное будет прямолинейным. При наличии поступательного движения путь тела представляют в виде кривых линий.
Рисунок 1 . Поступательное криволинейное движение кабин колеса обзора
Свойства поступательного движения определяются теоремой: при поступательном движении все точки тела описывают одинаковые траектории и в каждый момент времени обладают одинаковыми по модулю и направлению значениями скорости и ускорения.
Следовательно, поступательное движение твердого тела определено движением любой его точки. Это сводится к задаче кинематики точки.
Если имеется поступательное движение, то общая скорость для всех точек тела υ → называется скоростью поступательного движения, а ускорение a → — ускорением поступательного движения. Изображение векторов υ → и a → принято указывать приложенными в любой точке тела.
Понятие о скорости и ускорении тела имеют смысл только при наличии поступательного движения. В других случаях точки тела характеризуются разными скоростями и ускорениями.
Вращательное движение абсолютно твердого тела вокруг неподвижной оси – это движение всех точек тела, находящихся в плоскостях, перпендикулярных неподвижной прямой, называемой осью вращения, и описывание окружностей, центры которых располагаются на этой оси.
Чтобы определить положение вращающегося тела, необходимо начертить ось вращения, вдоль которой направляется ось A z , полуплоскость – неподвижную, проходящую через тело и движущуюся с ним, как показано на рисунке 2 .
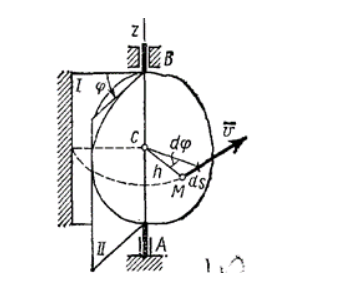
Рисунок 2 . Угол поворота тела
Положение тела в любой момент времени будет характеризоваться соответствующим знаком перед углом φ между полуплоскостями, который получил название угол поворота тела. При его откладывании, начиная от неподвижной плоскости (направление против хода часовой стрелки), угол принимает положительное значение, против плоскости – отрицательное. Измерение угла производится в радианах. Для определения положения тела в любой момент времени следует учитывать зависимость угла φ от t , то есть φ = f ( t ) . Уравнение является законом вращательного движения твердого тела вокруг неподвижной оси.
При наличии такого вращения значения углов поворота радиус-вектора различных точек тела будут аналогичны.
Вращательное движение твердого тела характеризуется угловой скоростью ω и угловым ускорением ε .
Уравнения вращательного движения получают из уравнений поступательного, используя замены перемещения S на угловое перемещение φ , скорость υ на угловую скорость ω , а ускорение a на угловое ε .
Вращательное и поступательное движение. Формулы
| Поступательное | Вращательное |
| Равномерное | |
| s = υ · t | φ = ω · t |
| υ = c o n s t | ω = c o n s t |
| a = 0 | ε = 0 |
| Равнопеременное | |
| s = υ 0 t ± a t 2 2 | φ = ω 0 t ± ε · t 2 2 |
| υ = υ 0 ± a · t | ω = ω 0 ± ε · t |
| a = c o n s t | ε = c o n s t |
| Неравномерное | |
| s = f ( t ) | φ = f ( t ) |
| υ = d s d t | ω = d φ d t |
| a = d υ d t = d 2 s d t 2 | ε = d ω d t = d 2 φ d t 2 |
Задачи на вращательное движение
Дана материальная точка, которая движется прямолинейно соответственно уравнению s = t 4 + 2 t 2 + 5 . Вычислить мгновенную скорость и ускорение точки в конце второй секунды после начала движения, среднюю скорость и пройденный за этот промежуток времени путь.
Похожие публикации:
- Зеленая полоса на мониторе что делать вертикальная
- Как прикрепить письмо к письму в mail
- Как сложить числа в эксель
- Сколько меди в катушке зажигания ваз