Как я научился работать с микроконтроллерами — опыт новичка
Всем привет. В этой статье хотел рассказать о том, как я научился работать с микроконтроллерами
(далее по тексту — МК) и на какие подводные камни налетел. Сразу скажу — статья не претендует на эксклюзивность, так как любой человек работающий с МК проходил через то, что прошёл я. Прошу строго не судить, а прочитать как историю.
Вместо вступления
Впервые интерес к МК у меня возник, когда я учился в 10 классе. На тот момент был 2009 год. Я умел немного программировать на ПК в QBasic и Visual Basic — школьная программа, но так сложилась жизнь, что я особо не разбирался в программировании, да и отсутствие знающих людей по части электроники и МК рядом сделали своё дело — для меня это была новая ниша. Хотя я с детства ковырялся с платами и микросхемами найденными на помойках, но как оно работало я толком не понимал — толком никто не мог объяснить. Как работает транзистор нормально я узнал только спустя пару лет после описанных событий. Когда я выбирал первый МК то смотрел характеристики на сайте ЧИП-ДИП. Скажу честно — для меня это было как иероглифы. Так что не стоит этого бояться. И да, про Arduino тогда никто понятия не имел.
Как всё началось
Начал ковыряться в яндексах и гуглах. Понимал, что сам контроллер — половина дела, нужна ещё и программа. А как сказано во вступлении — с программированием у меня было не очень. В конце концов попал на какой-то сайт. Как стало позднее ясно, я с этим сайтом реально «попал». Создатель сайта написал ещё и учебник по программированию, я на радостях скачал учебник и первое что там увидел — «В качестве образца для работы я использовал PIC16F84A ». Собственно так я и выбрал свой первый МК. Теперь вопрос — почему я именно «попал». А попал я из-за того, что создатель этого учебника и сайта предлагал программировать МК на АССЕМБЛЕРЕ. Его не все практикующие проггеры то знают, а тут новичок… Контроллер я уже заказал, и только потом начал читать учебник, к сожалению.
Как я выходил из положения
После того, как я понял, что ничего не понял, я забросил МК на пару лет, но параллельно всё-таки шарился на форумах типа Схем.нет и прочих, и ко мне постепенно приходило понимание вопроса. Решил учиться кстати на модели PIC16F877A.
Итак, что нужно знать новичку:
Микроконтроллер — это маленький компьютер, в нём есть и Арифметико-логическое устройство — процессор по сути дела, и оперативная память и некое подобие жесткого диска — память программ и данных, но выполнено это всё в одной микросхеме. Соответственно в зависимости от модели и производителя у него следующие характеристики (ориентировочно):

- Рабочие частоты от единиц до ~100 Мгц, я лично использую в своих устройствах как правило частоты 20 Мгц, именно МЕГАгерц, а не ГИГАгерц. Частота задаётся внешним источником тактирования — кварцевым или керамическим резонатором.
- Объём ОЗУ — единицы и десятки Килобайт
- Объём памяти под данные и программу — до нескольких десятков Килобайт. При желании можно расширить память для данных с помощью микросхем памяти. Для того чтобы использовать эти микросхемы для расширения памяти под программу — новичку стоит забыть, не всякий профессионал может это правильно сделать, да и не каждый микроконтроллер позволяет изменять свою прошивку во время работы.
- Рабочее напряжение от 1 до 5 вольт в зависимости от модели и производителя.
Микроконтроллер рассчитан на работу на плате, скажем так, в конкретной «железке», на плате, в устройстве. Так что не стоит думать, что на нём можно поиграть в CS 🙂
Языки программирования
Начал выбирать язык программирования и среду в которой можно программировать. Так как я хоть как-то знал Basic, то и задумался, что было бы хорошо прогать на нём. Да, он не очень совершенный и ещё куча недостатков, но для начала подходил как нельзя кстати. Мне повезло, оказалось, что есть язык PIC-Basic. По нему есть учебник, автор Чак Хелибайк и переведённое на русский руководство, собственно до всего доходил дальше по учебнику и руководству. Среда работает из-под ДОС, но можно прикрутить CodeStudio и всё будет работать из-под Windows.
Программатор
Следующая проблема, стоявшая у меня на пути — чем записать программу в чип. Понятное дело, что нужен программатор, я решил экономить, попробовал собрать несколько схем из этих ваших интернетов. Одной схемы недостаточно, нужна ещё программа которая используя программатор (саму железку) занесёт код в память. Все мои опыты окончились неудачами, по причине малого опыта. Решил я больше не смотреть на то, как от чипов идёт дым и заказал PICKit3, после этого не знал проблем, поигрался пару дней с ним и всё заработало.

Что нужно знать новичку:
- В настоящее время есть адаптированные языки программирования для МК, тот же Бэйсик, СИ и прочие.
- После написания программы она компилируется в машинный код — файлик с расширением HEX, его-то и надо прошивать в память МК.
- Для того, чтобы «прошить МК» — записать в него выполняемый код нужно две вещи:
Несколько слов про периферию
Для связи с внешним миром и удобства работы и разработки в МК встраивают различные периферийные схемы, например АЦП — аналогово-цифровой преобразователь, так что можно без лишней обвязки измерять напряжение подаваемое на вывод МК, но оно должно быть не выше чем напряжение питания, иначе чип сгорит. Используя делитель напряжения можно сделать вольтметр, например. Периферия, количество встроенных функций и их характеристики тоже зависят от модели, как правило чем дороже модель — тем богаче комплектация. Так же следует не забывать, что у контроллера ограниченное число ножек, к которым можно подключиться.
Например у PIC16F877А их 40 штук, причем 7 штук вылетают сразу, т.к. используются для подачи питания, подключения резонатора и управления аварийным сбросом. Так же надо внимательно смотреть документацию на чип. Например тот же АЦП — в PIC16F877А он может измерять напряжение только на 8 конкретных ножках чипа, на других он это делать не может. То есть под каждую встроенную функцию отводятся конкретные выводы и поменять их нельзя.
Суть сей басни такова
Освоить МК реально даже самому и с нуля, но есть места где не очень понятно. Если с программированием никогда не сталкивались, то сначала выучите хотя-бы азы программирования и напишите «Hello World» на компьютере. После этого будет проще. Если не хотите особо заморачиваться — Arduino Ваше всё. МК расчитаны на использование в «железках» — блоки управления, платы, контроллеры итд итп, это не полноценный компьютер, а контроллер. И ожидать от него следует соответственно. Благо сейчас полно примеров на ютубе, и я надеюсь, что мой опыт начинания с нуля будет не таким горьким и моя статья кому-нибудь, да поможет.
- микроконтроллеры
- новичкам
- новичок
- опыт работы
- pic
- pic16
- pic16f877a
- микроконтроллер
- микроконтроллеры для начинающих
- Программирование микроконтроллеров
- Схемотехника
- Электроника для начинающих
Микроконтроллеры. Устройство и особенности. Применение

Современные микроконтроллеры (МК) относятся к полупроводниковым компонентам, основное назначение которых – управление электронными устройствами. Они встраиваются непосредственно в исполнительный модуль, задавая режимы работы обслуживаемых изделий. На их основе реализована оригинальная идея, позволяющая совместить в одном кристалле сразу несколько функций.
Подобно классическому компьютеру они содержат в своем составе не только центральный процессор. Помимо него в МК входят рабочая память, ПЗУ, а также элементы периферии, объединенные в похожем на микросхему корпусе.
Что такое микроконтроллеры
Современный микроконтроллер, можно сравнить с основным элементом любого компьютерного устройства – микропроцессором. Последний представляет собой центральную часть ПК, выполненную на основе интегральных схем. Название «микропроцессор» (МП) указывает на то, что именно в этом модуле происходят все вычислительные операции, определяющие производительность системы в целом.
Чтобы получить на его основе полноценную ЭВМ – необходимо дополнить МП целым рядом внешних устройств. Добиться этого удается добавлением к этому модулю оперативной памяти и периферийных портов ввода-вывода информации. В результате получается законченное автономное устройство или компьютер.
Подобно ПК микроконтроллеры содержат в своем составе следующие компоненты:
- Микропроцессор.
- Оперативную память.
- Комплект периферии, состоящей из портов обмена информацией с обслуживаемым устройством.
В отличие от ПК он не является полностью самостоятельным (автономным) изделием. Микроконтроллеры, как правило, встраиваются в гаджеты, игрушки и в другие исполнительные устройства, функционированием которых они управляют.
Устройство МК

- Арифметико-логическое устройство служит для производства логических и арифметических операций, выполняет работу процессора совместно с регистрами общего назначения.
- Оперативно запоминающее устройство служит для временного хранения информации во время функционирования микроконтроллера.
- Память программ является одним из основных структурных элементов. Она основана на постоянном запоминающем устройстве с возможностью перепрограммирования, и служит для сохранения микропрограммы управления работой микроконтроллером. Она называется прошивкой.
- Память данных используется в некоторых моделях микроконтроллеров для записи различных постоянных величин, табличных данных и т.д. Эта память имеется не во всех микроконтроллерах.
- Для связи с внешними устройствами существуют порты ввода-вывода. Их также используют для подключения внешней памяти, различных датчиков, исполнительных устройств, светодиодов, индикаторов. Интерфейсы портов ввода-вывода разнообразны: параллельные, последовательные, оборудованные USB выходами, WI FI. Это расширяет возможности применения микроконтроллеров для различных сфер управления.
- Аналого-цифровой преобразователь требуется для введения аналогового сигнала на вход микроконтроллера. Его задачей является преобразование сигнала из аналогового вида в цифровой.
- Аналоговый компаратор служит для выполнения сравнения двух сигналов аналогового вида на входах.
- Таймеры используются для выполнения установки диапазонов и задержки времени в функционировании микроконтроллера.
- Цифро-аналоговый преобразователь исполняет обратную работу по преобразованию из цифрового сигнала в аналоговый.
- Действие микроконтроллера синхронизируется с генератором тактовыми импульсами с помощью блока синхронизации, который работает совместно с микропрограммой. Генератор тактовых импульсов может быть, как внутренним, так и внешним, то есть, тактовые импульсы могут подаваться с постороннего устройства.
Центральный процессор
Этот элемент микроконтроллера содержит следующие узлы:
- Арифметико-логическое устройство (АЛУ).
- Специальный интерфейс, обеспечивающий распределение потока данных.
- Генератор сигналов, вырабатываемых согласно инструкциям управляющей программы.
Для работы всех модулей микроконтроллера потребуются языки высокого уровня, позволяющие адаптировать простейшие команды к виду, понятному вычислительному устройству.
Память
Современные микроконтроллеры имеют собственную энергонезависимую память, необходимую для хранения рабочих данный и заранее составленных и адаптированных программ. Последние представлены перечнем (списком) инструкций, написанных на машинном языке.
Они в точности указывают процессору, что ему предстоит делать с полученными данными. В ситуации с микроконтроллерами энергонезависимая память чаще всего представлена флеш накопителями (автономными хранилищами информационных массивов), (ПЗУ).
Оперативная память (ОЗУ или RAM) используется для промежуточного хранения машинных данных. Они безвозвратно теряются, когда от микроконтроллера отключается питающее напряжение. Еще одно средство временного хранения информации – внутренние регистры, представленные соответствующими структурами в составе МП.
Периферийные устройства
Понятие «периферия» используется для описания аппаратных средств, позволяющих микроконтроллеру обмениваться информацией с внешними устройствами.
Основные виды периферийных средств это:
- АЦП.
- ЦАП.
- Генераторы опорного напряжения.
Помимо этого, микроконтроллеры включают в свой состав множество функциональных блоков, обеспечивающих выполнение предварительно введенной программы. Последние не относятся к периферийным средствам, как к таковым, поскольку отличаются от них по своему функционалу.
Прошивка и отладка микроконтроллеров
Для того, чтобы описываемые устройства могли выполнять свои функции – они предварительно прошиваются с помощью специальных аппаратных средств, называемых программаторами. И только после этого переходят к отладочным операциям.
Процедура отладки функционирования микроконтроллера необходима для того, чтобы разработчик мог контролировать порядок выполнения инструкций. Такой подход к подготовке устройства к работе позволяет найти и устранить возможные ошибки программистов, а также оптимизировать производительность самой программы.
Для контроля функционирования МК потребуется учесть еще одну его особенность, касающуюся операционной процедуры, называемой «прерывание». Под этим термином понимается организация процесса, благодаря которому удается решать сразу несколько задач (выполнять множество операций одновременно).
Прерывания запускаются импульсными посылками, генерируемыми внешними или внутренними аппаратными средствами. Эти посылки «вынуждают» процессор мгновенно переключаться на выполнение внеочередного блока команд, а затем возвращаться к прерванным операциям.
Организация электропитания МК
Микроконтроллеры, как и другие электронные устройства, способны выполнять свои функции только при наличии качественного электроснабжения. Для этого в их составе предусматривается целый ряд технических средств это:
- Интегрированные в структуру стабилизаторы напряжения.
- Модули управления и оптимизации потребления электроэнергии.
- Супервизоры.
Первые позволяют генерировать нужное питающее напряжение непосредственно в корпусе МК, а вторые обеспечивают снижение потребления тока в неактивных состояниях.
На микросхемах под названием «супервизоры» реализуются детекторы отклонений напряжения, используемые для защиты микроконтроллера от некачественного питания. При сильных колебаниях сетевого напряжения они переводят процессор в состояние сброса.
Принцип работы микроконтроллера
Порядок работы МК удобнее всего представить в виде множества операций, производимых составляющими его элементами. Но прежде важно отметить, что в архитектуру любого микроконтроллера заложена система команд, отличающихся своими кодами. При его работе происходит последовательное считывание командных блоков из внутренней памяти (или из порта ввода информации) с последующим их выполнением.
Ассортимент и количество возможных наборов команд определяется характеристиками конкретного МК, а их выполнение состоит в осуществлении определенной последовательности операций. Алгоритм работы микроконтроллера или его программное обеспечение разрабатывается с применением системных языков типа «Ассемблер» или «Форте». Но чаще всего используются версии «Бейсика», «Паскаля» или «Си». Перед рабочим программированием микроконтроллера он обязательно тестируется с использованием программных или аппаратных эмуляторов.
Разновидности МК
Микроконтроллеры производятся многими известными мировыми фирмами в ассортименте, достаточном для удовлетворения запросов потребителя. Среди выпускаемой в различных странах продукции встречаются следующие семейства электронных устройств:
- Современные 32-битные микроконтроллеры.
- Менее «мощная» 16-битная разновидность.
- «Простенькие» 8-битные модели (i8051, например, и ее аналоги).
Внутри каждого такого семейства встречаются схожие модели, различающиеся лишь скоростью работы ЦПУ и заявленными объемами памяти. В настоящее время насчитывается более 200 модификаций МК, совместимых с i8051 и множество других разновидностей.
Известные разработчики МК
Особой популярностью у разработчиков программно-управляемых гаджетов пользуются 8-битные МК PIC от «Microchip Technology». Не менее популярны и такие изделия, как:

- Микропроцессоры AVR фирмы «Atmel».
- 16-битные MSP430 фирмы «TI».
- 32-битные МК архитектуры ARM (разработка фирма «ARM Limited»).
- 16-битное 28-pin PDIP PIC24 изделие.
Области применения и достоинства
Микроконтроллеры применяются в различных цифровых устройствах, к которым относятся всевозможные игрушки, электронные часы и подобные им гаджеты. Кроме того, они применяются для управления следующими видами современной техники:
- Станочное оборудование.
- Насосные и вентиляционные системы.
- Большинство домашней техники.
- Автоматические системы различного класса (включая «умный дом» и т. п.).
В станках с ЧПУ микроконтроллеры позволяют автоматически управлять работой основной подачи и шпинделя, а в специальном оборудовании с их помощью удается включать и выключать его по заданной программе. В домашней технике они контролируют режимы работы, например, стиральных машин или управляют комплексом звуковоспроизводящей аппаратуры.
Существенное отличие этого модуля от обычного процессора, определяющее его основное преимущество – возможность менять прошивку и обновлять алгоритм управления обслуживающим устройством.
Таким образом с помощью микроконтроллеров удается гибко управлять устройствами, в которые они встроены. Некоторые МК способны непосредственно переключать обслуживаемые устройства (например, реле елочной гирлянды), обходясь без исполнительного модуля. Благодаря универсальности этих программируемых изделий удается сэкономить на комплектующих, не нуждающихся в обновлении с изменением поставленной задачи.
Похожие темы:
- Arduino Uno. Устройство и применение. Особенности
- Ардуино для проекта «Умный дом». Работа и особенности установки
- Системы автоматики. Виды и особенности применения
- Электронные генераторы. Виды и устройство. Работа и особенности
- Компараторы. Устройство и работа. Виды и применение. Особенности
- Операционные усилители. Виды и принцип действия. Питание
- Программируемый логический контроллер. Типы и работа. Особенности
- КМОП транзисторы. Работа и применение. Особенности
- Микроэлектромеханические системы (МЭМС). Особенности
- ПЗС матрицы. Виды и устройство. Параметры и особенности
- Аналого-цифровой преобразователь (АЦП). Устройство и работа
Введение Open Policy Agent (OPA)
Это проект, стартовавший в 2016 году, направленный на унификацию применения политик в различных технологиях и системах. Сегодня OPA используется гигантскими игроками в технологической индустрии. Например, Netflix использует OPA для управления доступом к своим внутренним ресурсам API. Chef использует его для предоставления возможностей IAM в своих продуктах для конечных пользователей. Кроме того, многие другие компании, такие как Cloudflare, Pinterest и другие, используют OPA для обеспечения соблюдения политик на своих платформах (например, кластеры Kubernetes). В настоящее время OPA является частью CNCF в качестве инкубационного проекта.
Что предлагает OPA?
Вы можете спросить: как возникла OPA? Какие проблемы пытается решить? Действительно, применение политик в отношении API и микросервисов так же старо, как и сами микросервисы. Никогда не было приложения production уровня, которое не обеспечивало бы какой-либо контроль доступа, авторизацию и применение политик. Чтобы понять роль OPA, рассмотрим следующий вариант использования: ваша компания продает ноутбуки через онлайн-портал. Как и все другие подобные приложения, портал состоит из главной страницы, где клиенты видят последние предложения, возможно, некоторые ограниченные по времени рекламные акции. Если клиенты хотят что-то купить, им необходимо войти в систему или создать учетную запись. Затем они осуществляют платежи с помощью своих кредитных карт или другими способами. Чтобы ваши клиенты постоянно посещали вас, вы предлагаете им подписаться на вашу рассылку новостей, которая может содержать специальные скидки. Кроме того, они могут выбрать получение уведомлений браузера, как только будут объявлены новые продукты. Типичное приложение для онлайн-покупок, не так ли? Теперь давайте изобразим, как этот рабочий процесс будет выглядеть на диаграмме, чтобы визуализировать процесс:

На диаграмме выше показано, как наша система может выглядеть внутри. У нас есть ряд микросервисов, которые взаимодействуют друг с другом для обслуживания наших клиентов. Теперь очевидно, что Боб не должен видеть никаких внутренних механизмов работы системы. Например, он не может просматривать (или даже знать) корзину S3, в которой архивируются платежи, или с какими службами может взаимодействовать API уведомлений. Но как насчет Джона? Он один из наших разработчиков приложений, и ему нужен доступ ко всем микросервисам, чтобы иметь возможность устранять неполадки и отлаживать их при возникновении проблем. Или он? Что, если он случайно (или намеренно) вызовет API-интерфейс службы базы данных, чтобы изменить адрес доставки клиента на другое место? Хуже того, что, если бы у него были разрешения на чтение номеров кредитных карт клиентов? Чтобы устранить эти риски, мы размещаем элемент управления авторизацией поверх каждого из наших микросервисов. Элемент управления проверяет, имеет ли аутентифицированный пользователь необходимые привилегии для выполнения запрошенной операции. Такая система авторизации может быть внутренним, собственным процессом или внешним, как это предусмотрено AWS IAM. Так создается и защищается типичное приложение для микросервисов. Но посмотрите на недостатки использования нескольких разных систем авторизации, особенно по мере роста приложения:
- Изменение существующих политик или введение новых — это кошмар. Только подумайте, сколько мест вам нужно будет посетить, чтобы предоставить Алисе доступ для чтения ко всем системам хранения. Это означает, что S3, MySQL, MongoDB и, возможно, внешний API, и это лишь некоторые из них.
- Разработчики не могут применять политики в своих собственных системах. Очевидно, они могут жестко запрограммировать свою логику авторизации в приложении, но это значительно усугубляет ситуацию: попытки унифицировать политики для разных микросервисов очень сложны.
- В дополнение к предыдущему пункту, введение новой политики для локальных служб может потребовать изменения кода и, таким образом, введения новых версий всех микросервисов.
- Что, если вы хотите интегрировать политики с существующей базой данных пользователей? Например, интеграция с базой данных HR.
- Нам нужно визуализировать политику, чтобы убедиться, что она выполняет то, что должна. Это приобретает все большее значение по мере усложнения вашей политики.
- Современные системы включают в себя множество технологий и сервисов, написанных на разных языках. Например, у вас может быть ядро вашей системы, работающее на Kubernetes, и множество устаревших API-интерфейсов, которые не являются частью кластера, написанного на Java, Ruby и PHP. Каждая платформа имеет собственный механизм авторизации.
Давайте посмотрим на Kubernetes в качестве примера. Если бы всем пользователям был разрешен доступ ко всему кластеру, может произойти множество неприятных вещей, таких как:
- Предоставление неограниченных запросов и ограничений для всех модулей может привести к выселению случайных модулей из узлов.
- Получение и использование непроверенных, случайных образов, которые могут содержать уязвимости безопасности или вредоносный контент.
- Использование контроллеров Ingress без TLS, позволяющих передавать в приложение незашифрованный и незащищенный трафик.
- Многочисленные другие непредвиденные риски из-за общей сложности.
Конечно, вы можете использовать RBAC и политики безопасности Pod для детального контроля над кластером. Но опять же, это применимо только к кластеру. Kubernetes RBAC бесполезен, кроме как в кластере Kubernetes.
Вот где в игру вступает Open Policy Agent (OPA). OPA был введен для создания унифицированного метода обеспечения соблюдения политики безопасности в стеке.
Как работает OPA?
Ранее мы исследовали стратегии обеспечения соблюдения политик и то, что OPA пытается решить, — это показало нам, «что». А теперь давайте посмотрим, «как».
Допустим, вы внедряете платежную службу нашего примера приложения. Эта служба отвечает за обработку платежей клиентов. Он предоставляет API, в котором принимает оплату от клиента. Это также позволяет пользователю запрашивать, какие платежи были произведены конкретным клиентом. Итак, чтобы получить массив, содержащий покупки, сделанные Джейн, которая является одним из клиентов компании, вы отправляете запрос GET в API с путем / payment / jane. Вы указываете свои учетные данные в заголовке авторизации и отправляете запрос. Ответом будет массив JSON с запрошенными вами данными. Однако, поскольку вы не хотите, чтобы кто-либо, имеющий доступ к сети, имел доступ к Payments API для просмотра таких конфиденциальных данных, вам необходимо применить политику авторизации. OPA решает проблему следующим образом:
- Payments API запрашивает решение у OPA. Он сопровождает этот запрос некоторыми атрибутами, такими как метод HTTP, используемый в запросе, путь, пользователь и т. д.
- OPA проверяет эти атрибуты на соответствие уже предоставленным данным.
- После проверки OPA отправляет решение запрашивающему API с разрешением или запретом.
Здесь важно отметить, что OPA отделяет наше решение о политике от применения политики. Рабочий процесс OPA можно изобразить на следующей диаграмме:

OPA — это универсальный инструмент принудительного применения политик, не зависящий от домена. Он может быть интегрирован с API, демоном SSH Linux, хранилищем объектов, таким как CEPH, и т. Д. Разработчики OPA намеренно избегали основывать его на каком-либо другом проекте. Соответственно, запрос политики и решение не следуют конкретному формату. То есть вы можете использовать любые допустимые данные JSON в качестве атрибутов запроса, если они предоставляют необходимые данные. Точно так же решение политики, исходящее от OPA, также может быть любыми действительными данными JSON. Вы выбираете, что вводится, а что выводится. Например, вы можете выбрать, чтобы OPA возвращал объект JSON True или False, число, строку или даже сложный объект данных.
Внутреннее устройство OPA
Чтобы полностью понять OPA и начать применять его в своих проектах, вы должны ознакомиться с его функциями и компонентами. Начнем с того, как вы определяете свою политику.
Язык политики: Rego
Rego — это декларативный язык высокого уровня, созданный специально для OPA. Это упрощает определение политик и ответы на такие вопросы, как: разрешено ли Бобу выполнять GET-запрос на /api/v1/products ? Какие записи ему разрешено просматривать?
Развертывание
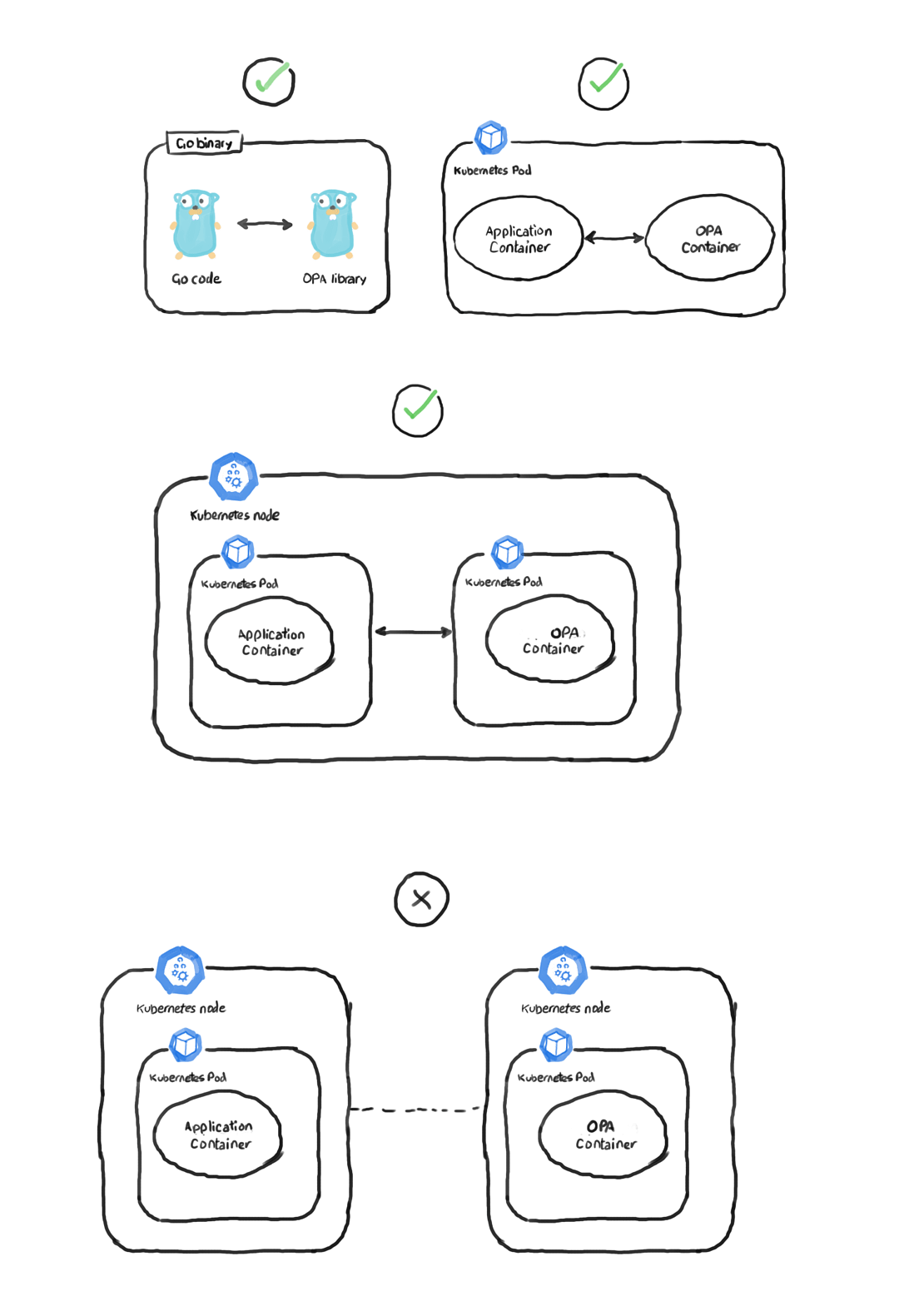
Когда дело доходит до развертывания OPA, у вас есть несколько вариантов в зависимости от вашего конкретного сценария:
- В качестве библиотеки Go: если ваше приложение написано на Golang, вы можете реализовать OPA как стороннюю библиотеку в приложении.
- В качестве демона: если вы не используете Go, вы можете развернуть OPA, как и любую другую службу, в качестве демона. В этом случае рекомендуется использовать дополнительный контейнер или запускать его на уровне хоста. Причина в том, что такая конструкция увеличивает производительность и доступность. Представьте, что у вас есть OPA, развернутый в Kubernetes в отдельном модуле, который находится на отдельном узле, а не на том, где работает модуль вашего приложения. Теперь, каждый раз, когда вашей службе требуется обратиться к OPA для принятия решения о политике, она должна совершать вызов по сети, чтобы связаться с модулем, в котором работает OPA. Это приводит к ненужной задержке и может вызывать задержки приложений в часы пик.
Как управлять и контролировать OPA?
Чтобы еще больше уменьшить задержку, разработчики решили, что OPA должен хранить все данные политики в памяти. Это гарантирует, что OPA не будет запрашивать данные у другой службы. Для работы с OPA у вас есть набор API, которые служат для разных целей:
- API сервиса Bundle: используется для отправки данных политики в OPA. OPA постоянно опрашивает API службы Bundle в поисках новых версий политики. После обнаружения он извлекает и применяет новую версию.
- API статуса сервиса: используется для определения статуса сервиса. Он сообщает вам текущую версию политики, которая активна в OPA.
- API службы журнала решений: каждый раз, когда OPA принимает решение о политике, оно регистрирует его. Позже он отправляет пакеты этих журналов в API службы журналов. Это особенно полезно для аудита и устранения неполадок.
- Инструменты для создания, тестирования и отладки политик: набор инструментов командной строки, которые вы можете использовать, например, opa test, opa run, opa check и т. д. Для упрощения разработки доступен также подключаемый плагин VS Code.
Ваша первая политика OPA
К настоящему времени у вас должно быть довольно четкое представление о том, почему появился OPA, проблемы, которые он пытается решить, и как он был спроектирован и решен. Пришло время проверить воду и посмотреть, каково это — создавать политику на языке Rego. Первый шаг — сформулировать свою политику на простом английском языке. Например:
«Клиенты должны иметь возможность просматривать свои собственные платежи. Сотрудники финансового отдела должны иметь возможность просматривать любые платежи клиентов».
Следующим шагом будет преобразование политики в код Rego. Для этого мы можем использовать Rego. Итак, на главной панели очистите код, который уже был добавлен туда, и добавьте следующее:
package play # Customers should be able to view their own payments allow = true
Давайте рассмотрим этот фрагмент построчно:
- Любые строки, начинающиеся со знака решетки (#), являются комментариями. Всегда полезно писать о том, что ваша политика должна делать, в виде связного, удобочитаемого комментария.
- allow = true означает, что решение будет разрешено, если следующие «оценки» верны.
- Метод ввода — GET. Любой другой метод HTTP (POST, PUT и т. Д.) Нарушит политику.
- Путь: /payments/customer_id . Обратите внимание, что customer_id не заключен в кавычки, что означает, что это переменная, которую необходимо подставить во время вызова.
- Пользователь также должен быть customer_id .
Если бы мы перевели этот код обратно на простой язык, это выглядело бы примерно так:
«Разрешите запрос, если он использует метод GET, путь — /payments/customer_id , а пользователь — тот же customer_id . Что эффективно позволяет клиенту просматривать свои собственные платежные данные ».
Rego также позволяет вам оценить ваш код и убедиться, что политика работает должным образом. В панели INPUT мы можем подделать законный запрос, добавив следующий код:
Обратите внимание, что INPUT использует произвольный JSON. Нет никаких особых правил, которым нужно следовать при отправке запроса. Теперь давайте посмотрим, как OPA ответит на этот запрос о решении, нажав кнопку Evaluate. На панели OUTPUT должно отображаться следующее:
Ниже приведен снимок экрана площадки после выполнения вышеуказанных действий:

Теперь давайте попробуем изменить пользователя в запросе на alice, что означает, что клиент пытается просмотреть платежи другого клиента. Если мы нажмем Evaluate, вы заметите, что на выходе отображается пустой объект JSON <>. Причина в том, что OPA не знает, что отправлять, если политика не соответствует. Чтобы изменить это поведение, добавьте следующий оператор перед телом политики:
default allow = falseИтак, вся политика должна выглядеть так:
package play # Customers should be able to view their own payments default allow = false allow = true
Теперь, если вы нажмете Evaluate, вы увидите ожидаемый результат:
Обратите внимание, что Rego настолько мощна, что вы можете выбирать части политики и оценивать ее независимо от остальной политики. Это может быть очень полезно, когда у вас сложная политика, которая дает ложную оценку, хотя этого не должно быть. В этом случае вы можете выбрать части политики и посмотреть, где именно возникает ошибка.
Хорошо, теперь, когда мы выполнили первую часть нашей политики, давайте перейдем ко второй части: сотрудники финансового отдела должны иметь возможность просматривать любые платежи клиентов.
Добавьте следующие строки после политики, которую мы определили ранее:
Сотрудники финансового отдела могут просматривать любые платежи клиентов
allow = true < input.method = "GET" input.path = ["payments", customer_id] finance[input.user] >finance =
Большая часть этой политики похожа на предыдущую, за исключением строки 4. Вместо оценки того, совпадает ли идентификатор пользователя с идентификатором клиента, мы оцениваем, является ли пользователь частью финансового объекта JSON. Rego имеет множество встроенных конструкций, которые позволяют делать много полезных вещей, включая поиск. Наконец, мы определяем финансовый объект и добавляем имена пользователей для сотрудников, работающих в этой группе. В реальном сценарии этот объект JSON будет передаваться как часть запроса INPUT или как токен. Теперь давайте протестируем политику, задав для пользователя и клиента одно и то же имя (например, bob). Политика должна возвращать истину. Измените пользователя на john (который работает в финансовом отделе) и протестируйте политику. Опять же, он должен вернуть истину. Наконец, измените имя пользователя на любое имя, которое не работает в финансовом отделе (скажем, Джейн), и политика должна вернуть false.
Вы можете узнать больше о языке Rego и о том, что с ним делать, обратившись к официальной документации.
Интеграция OPA с другими системами
Как упоминалось ранее, OPA можно интегрировать со многими современными платформами. Давайте посмотрим на несколько примеров того, что OPA может для вас сделать:
Kubernetes:
- Убедитесь, что имена узлов входа изменяются только командой внешнего интерфейса.
- Запретить извлекать любые образы, кроме тех, которые поступают из корпоративного реестра Docker.
- Принудительное использование запросов и ограничений для любых модулей, созданных в кластере.
Авторизация API:
- Вы можете использовать OPA с Envoy, Istio и другими платформами для обеспечения контроля IAM. Например, вы можете легко контролировать доступ сотрудников службы безопасности к конфиденциальным данным.
Linux PAM:
- Подключаемые модули аутентификации (PAM) уже давно используются в Linux для предоставления детализированных элементов управления множеству служб, включая SSH и sudo. OPA имеет плагин PAM, который позволяет ему интегрироваться с PAM и применять политики. Например, вы можете ограничить доступ по SSH к своим производственным машинам, если только в нерабочее время или если у пользователя нет открытой заявки в службу поддержки.
Есть также много других продуктов, которые можно интегрировать с OPA, чтобы предоставить безграничные возможности. Например, Kafka, ElasticSearch, SQLite и CEPH и многие другие.
TL; DR
- Необходимость авторизации так же стара, как и само программное обеспечение.
- Отсутствие централизованной системы авторизации, которая может использоваться между различными системами и платформами, вызвало множество проблем. Например, API-интерфейсы могут иметь собственную логику авторизации, встроенную в код, другие микросервисы могут зависеть от одной или нескольких внешних систем авторизации. Это делает развертывание новых политик, проверку версии существующей или даже внесение незначительных изменений в очень сложную операцию.
- OPA работает, выступая в качестве консультанта той службы, которая должна принять решение об авторизации. Служба отправляет запрос решения в OPA, затем OPA проверяет запрос на основе уже сохраненных в нем политик и отвечает с решением.
- OPA был разработан как универсальный и не зависящий от платформы. Соответственно, вам не нужно соблюдать какие-либо правила при отправке запросов или определении того, как будет выглядеть результат. Запросы и ответы отправляются в формате JSON.
- Политики могут быть написаны на Rego, языке, специально разработанном для OPA. Подобно JavaScript, OPA позволяет очень легко преобразовать простые английские правила в действующие политики OPA.
- Инструмент «Rego» — отличный способ опробовать ваши политики перед их внедрением.
- OPA можно развернуть либо как библиотеку Go, которая становится частью двоичного файла приложения, либо как автономный демон.
- Поскольку принятие решений о политике происходит при каждом запросе API, настоятельно рекомендуется разместить демон OPA как можно ближе к приложению. Например, как дополнительный контейнер в модуле Kubernetes или как демон, работающий на самом узле. Эта практика помогает уменьшить задержку и уменьшить сетевой трафик.
- OPA использует ряд API-интерфейсов, которые упрощают внедрение новых политик, проверку версии и статуса существующих или сбор данных аудита и журналов.
- В этой статье мы рассмотрели простую демонстрацию того, как использовать язык Rego для обеспечения соблюдения политики. В этом примере мы показали, насколько легко реализовать сложную политику и протестировать ее с помощью языка Rego и инструмента «игровая площадка».
- OPA может интегрироваться со многими современными системами и платформами, такими как Kubernetes, Kafka, SQLite, CEPH и Terraform. С помощью подключаемого модуля PAM он также может интегрироваться с Linux PAM для обеспечения расширенного контроля политик на демонах Linux, использующих PAM (например, sshd и sudo).
Немного рекламы: На платформе https://rotoro.cloud/ вы можете найти курсы с практическими занятиями:
- Ansible для начинающих + практический опыт
- Certified Kubernetes Administrator (CKA) + практический опыт
- Docker для начинающих + практический опыт
- Kubernetes для начинающих + практический опыт
- Terraform для начинающих + практический опыт
- Практика для вхождения в IT (Linux, Docker, git, Jenkins)
- Информационная безопасность
- DevOps
Разработка электроники. О микроконтроллерах на пальцах
Задумывая технологический стартап, вы совсем не обязаны быть асом в электронике, гораздо больше шансов на хорошую идею имеет узкий специалист со знанием основ маркетинга, но, даже заказывая кому-то разработку, ориентироваться в возможностях современной элементной базы и представлять цену решения необходимо обязательно. Иначе можно потребовать невозможного, либо получить устройство с завышенной себестоимостью на устаревшей элементной базе.
Под катом попытка кратко и просто рассказать о возможностях современных микроконтроллеров людям от них далёким. Для тех, у кого есть идея нового электронного устройства, но отсутствует представление о том, что такое микроконтроллер. Те, кто хочет сделать первый шаг от занимательных экспериментов с платформой ардуино к проектированию собственных устройств, также могут найти в ней простые, но полезные советы. Я старался, не останавливаясь на технических подробностях, для этого и книги не достаточно изложить суть и дать несколько простейших, но полезных советов по схемотехнике, чтобы предостеречь от элементарных ошибок начинающих.
Краткое содержание статьи:
Защита кода, возможность его обновления и многообразие помогли микроконтроллерам завоевать мир
Любой умный прибор требует управления. В большинстве случаев сегодня этим занимаются микроконтроллеры — чипы, которые совмещают в себе микропроцессорное ядро, память и периферийные модули, отвечающие за связь с остальными компонентами устройства и внешним миром.

Микроконтроллеры — мастера на все руки. Один микроконтроллер способен заменить десятки специализированных микросхем, которые были бы необходимы для выполнения требуемых функций в случае, если бы роль вычислителя занимал микропроцессор.
Одно из неоспоримых преимуществ микроконтроллера — программа, под управлением которой он работает, скрыта внутри его корпуса (в секции под названием “память программ”) и очень хорошо защищена от взлома, конечно, в случае, если разработчик микрокода об этом позаботился, активизировав встроенные механизмы защиты. Таким образом, вы получаете защиту интеллектуальной собственности настолько большую, насколько это возможно в наши дни.

Что нельзя взломать — то можно скопировать. Зачем пытаться считать код, встроенной в микроконтроллер программы, с помощью дорогостоящих хитроумных приспособлений, если проще и дешевле найти профессионала, который может написать его заново? Возможно результат будет даже лучше, а функционал богаче чем у прототипа. Да это стоит денег, но содержание FLASH памяти сегодняшних микроконтроллеров настолько хорошо защищено, что попытки грубого “взлома” обойдутся ещё дороже. Кроме того, решается проблема интеллектуальной собственности, а вы, вместе с исходными кодами программы, получаете возможность развивать и совершенствовать своё устройство.
Память программ, в современных универсальных микроконтроллерах, является перезаписываемой, причём процесс перезаписи можно повторять не один десяток тысяч раз. Напрашивается использование этого факта для обновления программного обеспечения с целью устранения найденных в нём ошибок или расширения функций уже работающего устройства. Это достаточно просто реализовать — добавив в программу специальный участок кода под названием “бутлоадер”, вы получаете возможность обновлять программное обеспечение вашего прибора различными способами: в пункте сервисного обслуживания (если устройство имеет специальный, скрытый внутри корпуса от посторонних глаз, разъём), подключив к компьютеру по USB, через сетевой или даже беспроводной интерфейс. Главное, предусмотреть в приборе необходимую для этого периферию. Предоставляя возможность обновления ПО, всегда следует думать о безопасности, если этот процесс недостаточно защищён, мало того, что злоумышленники могут похитить ваш код, они могут модифицировать его и использовать в своих не исключено, что коварных целях. Например, взять под контроль вещи вашего “умного дома” или шпионить с помощью, установленной вами же у себя дома, WEB камеры.
Архитектура ARM — сегодняшний лидер рынка микроконтроллеров
Со времён Царя Гороха микроконтроллеры принято разделять по разрядности данных, над которыми они проводят операции. В подавляющем большинстве случаев, сегодня, в новых разработках, стоит останавливать свой выбор на 32 битных микроконтроллерах с ядром АRM. Существует огромное количество их модификаций и всегда можно подобрать экземпляр, наилучшим образом подходящий для решения вашей задачи. В зависимости от набора функций и производительности, цена чипа может составлять от десятков центов до десятков долларов.
Микроконтроллеры(MCU), в зависимости от архитектуры вычислительного ядра, принято разделять на крупные семейства. На сегодняшний день, для разработок устройств малой и средней сложности, наиболее популярны микроконтроллеры c ядрами от Cortex-M0 до Cortex-M7. Чем больше цифра, тем больше вычислительные (и не только) возможности, цена и максимальное энергопотребление. Не последнюю роль в популярности ARM сыграла преемственность архитектуры. Разработчик может с минимальными издержками модифицировать программный код своих предыдущих наработок, переходя от микроконтроллеров одного производителя к чипам другого и мигрируя между ядрами с разной производительностью.

Конкуренция с младшими братьями
Однако ARMы «рулили» не всегда. Я хорошо помню времена, когда абсолютными лидерами рынка были 8 битные микроконтроллеры и, с занятых позиций, их безуспешно пытались оттеснить 16 битные коллеги, но, по иронии судьбы, удалось сделать это только 32 битным старшим братьям. Так сложилось, что к моменту их появления, технологии изготовления чипов сильно удешевили интеграцию в них больших объёмов FLASH памяти. Воспользовавшись удобным случаем, программисты стали переходить с ассемблера на язык более высокого уровня — Си, структура которого отлично ложилась на 32 битную архитектуру. В результате 32 битные микроконтроллеры выполняли вычисления гораздо быстрее своих 8 и 16 битных коллег, но была одна проблема — у них был выше ток потребления.
Поэтому, поначалу, они использовались в случаях, когда требовалась большая вычислительная производительность.
Известно, что средний ток потребления вычислительного ядра микроконтроллера существенно увеличивается с поднятием его тактовой частоты. Поначалу 8 битные модели микроконтроллеров отличались заметно меньшим потреблением при сходной частоте и, кроме того, были способны работать от низкой тактовой частоты, вплоть до 32 кГц.
Энергопотребление микроконтроллеров сильно зависит от тактовой частоты ядра и периферии, чтобы её регулировать, для генерации стали использовать, широко применявшийся в радиопередающих устройствах, узел формирования тактовой частоты на основе ФАПЧ. Это позволило в широких пределах изменять тактовую частоту, не меняя задающий кварцевый резонатор. Периферийным модулям совсем не обязательно иметь такую же тактовую частоту, что и вычислительному ядру. Чтобы снизить их энергопотребление, частоту на них стали подавать через делители с программно-регулируемым коэффициентом деления. Ввели возможность отключать неиспользуемые модули. Эти меры сильно уменьшили энергопотребление, но оно по прежнему оставалось существенно больше, чем у 8 битных.
На короткое время сложился паритет — 32 битные MCU захватили нишу топовых приложений, а 8 битные уверенно удерживали позиции в устройствах, для которых было важно низкое энергопотребление. Он сохранялся до тех пор, пока 32 битные MCU не освоили в совершенстве «импульсный» режим работы.
8-битники, к тому времени, тоже научились это делать, но, из-за низкой производительности, бодрствовать им приходилось гораздо больше и, как результат, они начали проигрывать по энергопотреблению, особенно в задачах, требующих расчётов, что иллюстрирует картинка ниже.

Об укладке асфальта, пользе сна и его разновидностях
Итак, микроконтроллеры настолько хорошо научились считать, что стали выполнять свою работу очень быстро и большинство времени были вынуждены “бить баклуши”, пожирая энергию для выполнения холостых циклов. В устройствах с автономным питанием это сильно сокращает ресурс батарей или время работы от одной зарядки аккумуляторов.
Понаблюдайте за строительными рабочими которые кладут асфальт. Они резко активизируют свою работу, когда пришёл грузовик с новой порцией асфальта, а после его укладки снижают темп. Так и микроконтроллеры умеют повышать и снижать частоту тактирования ядра. Однако, им это даётся не так просто, как рабочим — одновременно изменится и частота работы всей внутренней периферии, поэтому, чувствительные к этому её части придётся перенастраивать.
Не проще ли, выполнив быстро всю работу, немного поспать. Зачастую, да. Причём виды сна микроконтроллеров отличаются ещё более драматично, чем у человека.
Можно просто вздремнуть. В этом случае наш чип всегда наготове и как только зазвенел будильник таймера или его потревожило внешнее прерывание, он просыпается практически мгновенно. Как человек во время дремоты может снять напряжение, но не выспаться толком, когда тебя постоянно дёргают, так и микроконтроллер может снизить своё энергопотребление в этом режиме “всего” раз в 10, называют этот режим SLEEP.
Лучший способ хорошо выспаться — раздеться, лечь в постель, задёрнуть шторы на окне и включить будильник. Однако, после такого сна, уже моментально в работу не включишься. Придётся, как минимум, предварительно ополоснуться холодной водой и одеться. Есть такой режим и у микроконтроллера, когда он ограничивает количество внешних раздражителей и выключает основной тактовый генератор. Это режим STOP. В нём можно уменьшить потребление в 1000 раз, но и на выход из него уже потребуется существенное время.
Теперь, представьте себе, что вы перед сном выпили изрядную дозу снотворного, отключили будильник и телефон, закрыли все окна и двери. Это будет режим STAND BY. Вывести из такого режима микроконтроллер можно только с помощью особых выводов и большая часть памяти о том, чем он занимался перед таким сном будет потеряна навсегда, придётся начинать работу заново. Зато находясь в таком режиме MCU потребляет ещё в два раза меньше.
Последний, весьма экзотический режим, напоминает уже кому, из которой нельзя выйти без специального оборудования. В этом случае работает только специальный генератор тем не менее, являющийся частью микроконтроллера на отдельном часовом кварце, который может функционировать от собственного источника питания и иметь буквально несколько байт оперативной памяти, предназначение которой напомнить микроконтроллеру о том, из какого состояния он в эту кому впал. Если остальные части микроконтроллера, при этом, отключить от питания, то энергопотребление может составить уже одну десятитысячную часть от активного режима.
Выбирая режим экономии энергопотребления необходимо помнить о последствиях применения:
- чем глубже сон, тем дольше пробуждение
- чем глубже сон, тем меньше способов вывести из него микроконтроллер
- чем глубже сон, тем меньше остаётся информации о предыдущем состоянии микроконтроллера
- для достижения минимальных заявленных значений, во многих режимах необходимо принимать дополнительные меры, например — отключения периферии
- для минимизации энергопотребления устройства в целом необходимо грамотно спроектировать схемотехнику всего устройства
- для минимизации энергопотребления устройства в целом, нужно позаботиться о том, чтобы остальные компоненты и цепи также имели микропотребление в неактивном режиме. Глупо предпринимать огромные усилия для того, чтобы опустить потребление микроконтроллера ниже одного микроампера и, при этом, применять в устройстве дешёвый стабилизатор с током собственного потребления в 100 микроампер
но встречается такое сплошь и рядом - для успешного использования режимов глубокого сна не только программа, но и схемотехника, должны быть тщательно продуманы, иначе, вместо экономии, можно получить весьма серьёзные проблемы — редко случающееся, зато “мёртвое” зависание устройства по необъяснимой причине, либо слишком частое пробуждение и, как результат, потребление на порядки выше ожидаемого

Если ваши программист со схемотехником не первый день винят друг друга в криворукости и, вместе, производителя в публикации нереальных цифр в даташитах на микроконтроллер, а ваше устройство сажает батарейки на порядок быстрее, чем вы рассчитывали, это повод, по крайней мере, обратиться к независимым высококвалифицированным экспертам.
Совсем коротко о технологии изготовления и о том, как появляются серии микроконтроллеров

Физически активная часть микроконтроллера, как и подавляющее количество других микросхем, обычно сформирована на пластине монокремния (назовём его, в данном контексте, ЧИП). Чипы занимают очень маленькую площадь, технологически же выгодно производить пластины большого диаметра, поэтому, обычно большое количество чипов, как соты, размещают на одной большой пластине и формируют, в ходе одного технологического процесса. В последствии пластины нарезают на кусочки, получая уже отдельные чипы, которые и помещают в корпуса. Разработка топологии и отладка технологических процессов нового чипа стоит очень дорого, а занимаемое на пластине одним чипом место, как правило, не велико. Производителям выгодно выпускать чипы крупными партиями, но пользователям требуются микроконтроллеры в разных корпусах — кому то важно получить корпус поменьше и подешевле, другому наоборот требуется побольше выводов, чтобы управлять LCD или внешней памятью с параллельным интерфейсом. Производителям выгодно перекрывать все ниши, чтобы клиенты не перебегали к конкурентам, не найдя оптимальной для себя модели.
Очень часто бывает выгодней выпустить крупной партией один универсальный чип и помещать его в разные корпуса, чем запускать десяток различных. У чипов, помещённых в корпуса с малым количеством выводов, часть портов (в данном контексте, под портами будем понимать контактные площадки на поверхности чипа, служащие для общения с внешним миром) просто останутся неподсоединёнными. Часто производители идут дальше — чтобы поднять спрос и цену на микроконтроллеры с большим количеством ножек, они искусственно обрезают функциональность тех, у которых их меньше — отключают некоторые функции, ограничивают объём доступной памяти и т. п.
Так на основе одного чипа формируют серии микроконтроллеров, существенно отличающиеся по объёму памяти и набору периферийных модулей, иной раз и в разы по цене. При этом чипы, в них установленные, могут нарезаться из одних и тех же пластин. Поскольку площадь, на которой размещается один чип, невелика, вклад её в себестоимость конечного изделия также мал и им можно пожертвовать. Становится выгодным отключение дополнительной памяти и других функций, например, на этапе тестирования — либо с помощью однократно программируемых битов конфигурации, либо пережиганием перемычек лазером. Лишь для наиболее массовых изделий имеет смысл для этого создавать слегка изменённый фотошаблон. Причём, совсем не обязательно там будет физически отсутствовать неиспользуемая память, её, опять же, можно просто отключить, удалив перемычки в шаблоне.

Так из одного стандартного дизайна чипа формируется целая серия микросхем.
Периферия простейшего ARM микроконтроллера за пол бакса
Процессорное ядро — это мозг, но, чтобы он не был подобен “сферическому коню в вакууме”, требуются аналоги органов чувств и конечностей.
В микроконтроллере их роль играют выводы на корпусе, к которым внутри корпуса могут подключаются порты(контактные площадки) чипа. В свою очередь, через внутренние коммутаторы, к одному и тому же порту могут подключаться различные периферийные модули.
Для начала рассмотрим периферию одной из простейших серий от ST на основе ядра Cortex-M0 — stm32F03.

Для этой серии имеем следующий набор базовых функций:
Часы реального времени (Real Time Clock или RTC) , которые могут запитываться с помощью отдельного вывода и работают от отдельного низкочастотного резонатора. Этот модуль потребляет крайне мало энергии, в случае пропадания основного питания он может часами работать от заряженного конденсатора, или годами от маленькой встроенной в прибор батарейки. Кроме этого, он может служить в качестве будильника, выводя микроконтроллер из состояния даже самого глубокого сна в заранее заданное время.
WatchDog — сторожевая собака мешающая микроконтроллеру заснуть навсегда, например, свалившись в бесконечный цикл или перейдя по несуществующему адресу. Его принцип работы прост. Программист настраивает таймер защиты от “зависания” на определённый период времени, допустим на секунду, и запускает его. Затем он расставляет, в выбранных им местах программы, короткие участки кода, которые перезапускают таймер с нулевого значения. Если за секунду не произошло ни одного сброса таймера, WatchDog считает, что с программой что-то не так и устраивает микроконтроллеру перезапуск. Программа начинает работать с начала, причём существует возможность определить являлся ли инициатором ресета WatchDog и учесть этот факт при запуске.
Универсальные цифровые входы-выходы (General Purpose Input-Output GPIO) — это самая распространённая функция, которую поддерживают большинство выводов микроконтроллера. Они могут конфигурироваться либо как входы, либо как выходы.
Рассмотрим работу в качестве входа. Если напряжение на входе микроконтроллера меньше некоего порога (как правило близкого к половине питания), то оно воспринимается как логический ноль, в противном случае как 1. Цифровые входы обычно имеют очень высокое входное сопротивление, поэтому, если их оставить не подключенными, их состояние может скакать из нуля в единицу и обратно, под действием наводок электромагнитных полей. Для того, чтобы этого не происходило, существуют специальные режимы, когда внутри чипа вход соединяется через сопротивление 20 — 50 КОм с плюсом питания микроконтроллера (pull-up) или с минусом (pull-down).
Если выводы сконфигурированы цифровыми выходами, то их программно можно перевести в высокий уровень равный напряжению питания микроконтроллера, либо низкий. Существуют и более хитрые режимы, но не будем вдаваться в чрезмерные подробности.
Советы начинающим разработчикам
Выводы микроконтроллера — мастера на все руки, но следует соблюдать простые правила, чтобы не вывести их из строя. Несмотря на все предосторожности, предпринимаемые производителями чипов, они боятся статики и перенапряжений, поэтому не стоит подсоединять их напрямую к разъёмам, выходящим за пределы платы. Необходимо, в этом случае, предпринять меры — либо воспользоваться специальными интегральными компонентами защиты, либо предусмотреть в схеме супрессор, стабилитрон или защитные диоды, плюс установить в разрыв между выводом разъёма и портом токоограничивающее сопротивление.

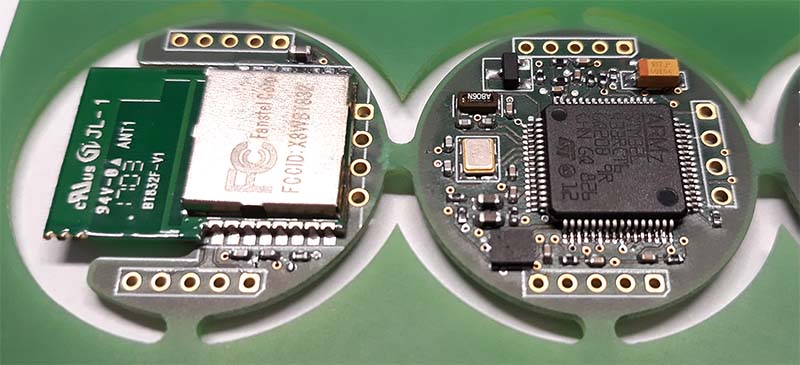
На рисунке выше изображён участок схемы, спроектированного мной устройства (спутникового модема), с элементами простейшей защиты портов микроконтроллера. X4 — разъём для внешних коммуникаций. Нас интересуют контакты 5-7, к которым присоединяются тревожные кнопки. Сигналом тревоги служит замыкание на землю, поэтому, в нормальном состоянии, на портах должно присутствовать напряжение питания микроконтроллера, что и обеспечивают резисторы R24-R26, номиналом 1 КОм. Супрессоры VD4-VD6 ограничивают напряжение на уровне 5 вольт, это допустимо потому, что применяемый мной микроконтроллер, хотя и питается напряжением 3,3 вольта, но имеет порты толерантные к напряжению 5 вольт. Резисторы R29-R31 на 100 Ом.
Подобная защита спасёт порты вашего микроконтроллера от внешних перенапряжений. У некоторых микроконтроллеров отдельные порты не боятся напряжений, превышающих их напряжение питания. Так у многих микроконтроллеров STM32Fxx почти все порты будучи сконфигурированными как цифровые могут работать с 5 вольтовыми цепями, но если они работают в аналоговом режиме, например в качестве входа АЦП, теряют эту способность и это необходимо учитывать при разработке схемы.
Пожалуйста, соблюдайте технику безопасности. Не оставляйте, свободные, висящие в воздухе порты микроконтроллера сконфигурированными в виде входов, особенно в устройствах временами уходящих в глубокий сон — это как минимум может значительно усложнить процесс прохождение вашего устройства теста на ЭМС (электро-магнитную совместимость). Если оставляете их входами, лучше замкнуть их на землю или питание. Либо программно сконфигурировать выходами.
Существует ещё один лайфхак. Иногда их можно оставить входом и замкнуть на другую цепь. Это помогает в случае очень плотной трассировки провести проводник «сквозь» микроконтроллер, что особо актуально для двухслойных плат.
Используя порты микроконтроллеров в качестве выходов, также стоит свериться с даташитом. Отдельные порты могут иметь разное ограничение по максимальному току, который от них можно получить не опасаясь выхода их строя — нагрузочную способность. Кроме этого, сам чип имеет максимальную нагрузочную способность всех выходов в сумме, которую не следует превышать.
Последнее, о чём хочется упомянуть, выходные порты ARM микроконтроллеров не реагируют на программные инструкции мгновенно, как у 8-битных микроконтроллеров. Они управляются через шину, и их быстродействие зависит от частоты тактирования соответствующего узла, которую можно менять программно. Если вы хотите быстрой реакции, позаботьтесь об увеличении этой частоты, если важнее уменьшить энергопотребление, наоборот выберите менее скоростной режим.
Температурный сенсор Микроконтроллер имеет свой собственный температурный сенсор, правда не слишком точный, тем не менее его можно, с определёнными допущениями, использовать для измерения температуры внутри корпуса прибора.
Уникальный серийный номер Каждый микроконтроллер имеет свой уникальный серийный номер, присвоенный ему на производстве. Очень удобная особенность, которую можно использовать при организации серийного производства ваших изделий.
Интерфейсы обмена данными Различные микроконтроллеры данной серии могут иметь по нескольку наиболее распространённых интерфейсов, сильно облегчающих общение с другими чипами и внешним миром:
- USART — асинхронный последовательный порт, часто использующийся для связи с компьютером
там он называется COM или RS232, модемами и другими устройствами - SPI — высокоскоростной интерфейс, который имеют очень многие чипы, например внешняя память
- I2C — двухпроводной интерфейс, разработанный для общения с датчиками и другой периферией на небольшом расстоянии и небольших скоростях обмена. Большой его плюс заключается в том, что одновременно к одной шине можно подключить десятки различных устройств
Аналого-цифровой преобразователь АЦП или ADС на котором придётся остановиться подробнее.
Чрезвычайно полезный модуль, который способен измерять напряжение аналоговых сигналов. Оценивает он их в долях от величины опорного источника сигнала, в нашем случае это напряжения питания аналогового модуля микроконтроллера, которое может быть равным или немного ниже основного напряжения питания чипа. Теоретическая точность работы АЦП зависит от его разрядности. В современных микроконтроллерах чаще всего применяется 12 разрядный АЦП последовательного приближения, реже 10 и как экзотика встречается 16.

При питании 3 вольта 12 разрядный АЦП микроконтроллера будет иметь разрешающую способность 3/4096=0.00073 Вольта — лучше одного милливольта.
Но на практике достичь этого идеала бывает не просто.
Подробности для начинающих разработчиков
На практике всё бывает далеко не так красиво и точность измерений может снижаться по многим причинам. Ниже перечисляю основные, хорошо известные любому опытному электронщику, а также простые но эффективные способы сведения их пагубного влияния до минимума
нестабильность напряжения источника питания АЦП
- применять для питания MCU линейные стабилизаторы с хорошими параметрами
- применять для питания аналоговой части MCU высокостабильные источники опорного напряжения
- подключать аналоговое питание к цифровому через простейшие фильтры низкой частоты — подавать питание на аналоговую часть MCU через индуктивность и в непосредственной близости от входа микроконтроллера устанавливать керамический конденсатор с диэлектриком XR7 ёмкостью 100 нанофарад, а ещё лучше, параллельно ему включить танталовый конденсатор с ёмкостью в одну — две микрофарады.
- пропускать входной сигнал хотя бы через простейший ФНЧ, состоящий из резистора и конденсатора. Для борьбы с помехами от передающих радиотрактов и короткими импульсными помехами иногда достаточно одиночного конденсатора с диэлектриком NP0 ёмкостью в несколько десятков пикофарад, установленного между входом и землёй, в непосредственной близости от входа АЦП
- не экономить на блокировочных конденсаторах, по крайней мере самого микроконтроллера, устанавливать их в непосредственной близости от каждого вывода питания и в других местах, рекомендованных производителем, рекомендованного им номинала
- тщательно выбирать месторасположение компонентов и соблюдать правила трассировки цепей питания и особенно “земли”, в идеале аналоговая и цифровая земли должны соединяться в одной точке — рядом с выводом аналоговой земли микроконтроллера

- правильно выбирать параметры настройки АЦП, например во многих микроконтроллерах можно увеличить время зарядки входной цепи, правда тут приходится идти на компромисс, снижая быстродействие
- устанавливать на входе АЦП буферные усилители на основе ОУ (операционный усилитель), или повторители напряжения. Выбирать их по принципу самых дешёвых не стоит, можно не улучшить, а ухудшить ситуацию, причём значительно. Если не хватает собственного опыта, лучше поискать специально рекомендованные производителями для подобных приложений
Выше изображён участок реальной схемы для подачи питания на аналоговую часть микроконтроллера в устройстве с батарейным питанием. В данном случая я использовал АЦП для оцифровки сигнала с аналогового MEMS микрофона и поэтому имело смысл выделить в отдельную цепь не только аналоговое питание, но и аналоговую землю. В большинстве случаев это избыточно, для того чтобы от неё действительно был толк, нужна ещё и правильная трассировка.
От цепи VBUT питается вся цифровая часть микроконтроллера. На всякий случай привожу номиналы элементов: R5-10 Ом, С10 0.1 мкФ, без индуктивностей L1 и L2 BLM18PG471SN1D в большинстве случаев можно обойтись.
Ещё один любопытный пример из моей практики. В плате, на которой размещалось большое количество высокопотребляющих чипов ASIC, необходимо было измерять их температуру. Самый простой и дешёвый способ — использование высокоомных термисторов. В качестве фильтров я применил конденсаторы достаточно большой ёмкости, воспользовавшись тем фактом, что температура меняется сравнительно медленно. Для оцифровки звука такой фокус однозначно бы «не прокатил».
Осталось упомянуть ещё одну важную особенность АЦП, характерную для микроконтроллеров. Собственно, модулей АЦП в нём, как правило, один или два, а вот входов может быть много. В описываемой серии модуль 1, а входов может быть до 16. Как же так? Очень просто, входы подсоединены к нему через коммутатор. Если вы собираетесь измерять напряжение с 10 входов, то должны организовать цикл — последовательно переключить коммутатор к каждому из 10 входов и сделать измерение. Это необходимо учитывать, рассчитывая времена измерения. В данной серии АЦП, теоретически, способно сделать измерение за 1 микросекунду. Получается, что полный цикл 10 измерений у вас займёт точно больше 10 микросекунд!
Система прямого доступа в память ПДП или DMA — ещё одна архиважная вещь. Этот модуль позволяет пересылать данные от периферии в память или наоборот.
Например, с его помощью вы можете выделить участок памяти для хранения данных, приходящих из АЦП и сделать из него кольцевой буфер. Далее запускается АЦП в режиме считывания данных через равные промежутки времени. Используя механизмы DMA, считанные данные будут, без участия ядра, самостоятельно, байт за байтом, помещаться в выделенный буфер. Когда буфер будет полностью заполнен, ядро получит сигнал и приступит к их программной обработке, а система DMA начнёт процесс загрузки сначала. Поскольку DMA имеет несколько каналов, то никто не мешает реализовать для нашего случая автоматический вывод на USART данных из буфера. В результате мы получим, работающий без использования ядра процесс передачи считанных с АЦП в USART, и не простая работа программиста по конфигурации DMA окупится сторицей.
Модуль широтно-импульсной модуляции ШИМ или PWM , в силу ограниченности статьи не будем останавливаться на нём подробно, отмечу только, что это крайне полезная и широко используемая функция, с помощью которой возможно управлять яркостью светодиодов, скоростью вращения двигателей, рулевыми машинками, конструировать интеллектуальные DC-DC преобразователи и даже звук синтезировать.
Что можно получить, добавив 30 центов?
Переход на Cortex-M0+. Самый дешёвый способ получить дополнительные функции
А какие дополнительные плюшки предлагает микроконтроллер новейшей серии с ядром чуть посовременнее Cortex-M0+, при стоимости на 20-50 центов дороже аналогов в рассмотренной выше серии по корпусу и количеству выводов?
Таблица отличий между сериями

- в два раза увеличилась максимальная тактовая частота
- с 2 до 1.7 вольт понизилось минимальное напряжение питания
- АЦП способно работать в два с половиной раза быстрее
- появились два канала 12 битного цифро-аналогового преобразователя. Это крайне полезная функция, с помощью которой возможно формировать на выводах сигнал заданного напряжения с точностью лучшей чем 1 мВ, например сигналы произвольной формы в звуковом диапазоне частот
- появились компараторы — устройства для сравнения величин двух аналоговых сигналов, это бывает полезным скажем для определения момента возникновения перегрузки по току
- добавлен USB интерфейс, посредством которого можно подключать устройства к компьютеру. Особый интерес вызывает наличие поддержки опций управления питанием для реализации USB type3-C совместимого интерфейса. О нём я рассказывал в одной из своих статей на Хабре
- появился ускоритель AES для процедур 256 битного шифрования/дешифрации
- UART получил возможность работы в режимах сна и аппаратную поддержку протоколов LIN (простая сеть, широко используется в автопроме), IRDA (протокол передачи данных посредством инфракрасных светодиодов, вспомните телевизионные пульты), SIMcard…
- расширены возможности таймеров и модуля PWM
- верхняя граница температурного диапазона работы поднялась до 125 градусов
- увеличена надёжность работы за счёт расширения режимов перезапуска при возникновении проблем с питанием
- добавлен “честный” аппаратный генератор случайных значений — полезная функция в криптографии
А что добавит переход на Cortex-M4, кроме возросшей в пару раз цены?

- Максимальная тактовая частота вырастает уже до 80 МГц
- Появился блок для ускорения вычислений с плавающей точкой
- Ясное дело, максимальная встроенная память увеличилась
- Модели с количеством ног 100 и более поддерживают работу с внешней статической памятью
- USB научился работать в режиме HOST
- Появился контроллер CAN интерфейса. Это очень перспективный интерфейс разработанный для высоконадёжных приложений. Своё победное шествие он начал с автомобильной промышленности и уже почти 20 лет ведёт затяжную войну с давно устаревшим RS-485 в крайне консервативной отрасли промышленной автоматизации.
- Появился интерфейс для подключения SDcard. Очень полезная функция — добавляете в своё устройство держатель за 50 центов и получаете съёмный носитель размером в десятки Гигабайт! С большинством карт удаётся работать и по обычному SPI, но намного медленнее
- Добавили встроенный Операционный Усилитель с большим разнообразием режимов работы. Именно благодаря этой и предыдущей функциям, для своего последнего проекта беспроводного стетоскопа, пришлось остановить выбор на M4 вместо M0+. В результате появилась возможность управлять усилением сигнала с MEMS микрофона и сохранять десятки часов аудиозаписей работы сердца на SD карте
- Криптомодуль научился аппаратно считать HASH функции.
- Контроллер сенсорных приложений усовершенствован и теперь поддерживает уже не только кнопки, но и элементы прокрутки
Cortex-M7 — когда хочется большего.

В подавляющем количестве проектов возможностей предоставляемых вышеописанными ядрами достаточно, но случаются и исключения. Лично со мной такое случалось всего пару раз, причём лишь один раз по действительно уважительной причине — требовалась высокая производительность для подготовки данных для ASIC, контроллер Ethernet и шина CAN-FD c повышенной скоростью обмена.
Если на уровне универсальных микроконтроллеров с ядрами Cortex 4 и ниже, на мой субъективный взгляд, по параметру цена/функциональность сейчас лидирует фирма ST, то в области более высокопроизводительных чипов она уступает лидерство ATMEL, вернее, теперь уже недавно поглотившему его MICROCHIP. Поэтому я остановил свой выбор на серии ATSAMV71, стоимостью от 6 долларов.
Помимо вышеописанного (контроллер Ethernet и шина CAN-FD), по большому счёту, мы получаем, существенно увеличивающее производительность ядро с ускорителем операций, работающее на тактовой частоте до 300 МГц, интерфейсы для подключения видеоматрицы и поддержку динамической памяти.
В заключении попрошу имеющих опыт общения с микроконтроллерами попрошу выбрать подходящий ответ на вопрос.