Проекция вектора на ось. Проекция вектора на вектор
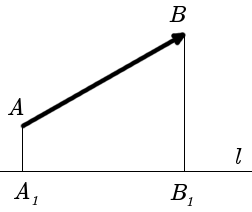
Определение. Проекцией вектора AB на ось l называется число, равное величине отрезка A 1 B 1 оси l , где точки A 1 и B 1 являются проекциями точек A и B на ось l . (рис. 1).
 |
| рис. 1 |
Определение. Проекцией вектора a на направление вектора b , называется число, равное величине проэкции вектора a на ось проходящую через вектор b .
Формула вычисления проекции вектора на вектор
Для вычисления проекции вектора a на направление вектора b из определения скалярного произведения получена формула:
| Пр b a = | a · b |
| | b | |
Примеры задач на проекцию вектора
Примеры вычисления проекции вектора для плоских задач
Пример 1. Найти проекцию вектора a = <1; 2>на вектор b = .
Найдем скалярное произведение этих векторов
a · b = 1 · 3 + 2 · 4 = 3 + 8 = 11
Найдем модуль вектора b
| b | = √ 3 2 + 4 2 = √ 9 + 16 = √ 25 = 5
Найдем проекцию вектора a на вектор b
| Пр b a = | a · b | = | 11 | = 2.2 |
| | b | | 5 |
Ответ: Пр b a = 2.2.
Примеры вычисления проекции вектора для пространственных задачи
Пример 2. Найти проекцию вектора a = <1; 4; 0>на вектор b = .
Найдем скалярное произведение этих векторов
a · b = 1 · 4 + 4 · 2 + 0 · 4 = 4 + 8 + 0 = 12
Найдем модуль вектора b
| b | = √ 4 2 + 2 2 + 4 2 = √ 16 + 4 + 16 = √ 36 = 6
Найдем проекцию вектора a на вектор b
| Пр b a = | a · b | = | 12 | = 2 |
| | b | | 6 |
Ответ: Пр b a = 2.
Любые нецензурные комментарии будут удалены, а их авторы занесены в черный список!
Присоединяйтесь
© 2011-2023 Довжик Михаил
Копирование материалов запрещено.
Добро пожаловать на OnlineMSchool.
Меня зовут Довжик Михаил Викторович. Я владелец и автор этого сайта, мною написан весь теоретический материал, а также разработаны онлайн упражнения и калькуляторы, которыми Вы можете воспользоваться для изучения математики.
Если Вы хотите связаться со мной, имеете вопросы, предложения или хотите помочь развивать сайт OnlineMSchool пишите мне support@onlinemschool.com
Как найти проекцию вектора на плоскость
В. Г. Автор. Векторная и тензорная алгебра для будущих физиков и техников
.Геометрическое определение вектора
.Алгебраические операции над направленными отрезками
..Сложение направленных отрезков
..Умножение направленных отрезков на число
..Параллельное проектирование вектора в пространстве
..Параллельное проектирование вектора в пространстве
. Проекция точки на плоскость
. Проекция вектора на плоскость
..Ортогональная проекция вектора в пространстве
. Ортогональная проекция вектора на плоскость
. Ортогональная проекция вектора на прямую и направленную ось
..Векторы в трехмерном геометрическом пространстве
..Линейная зависимость векторов и размерность пространства
..Различные формы записи векторов
..Линейные операции над векторами в координатной форме
. Свойства скалярного умножения
. Скалярное умножение в декартовых координатах
..Некоторые примеры использования скалярного умножения
..Площадь параллелограмма, построенного на векторах
..Задачи на применение определителей
..Определитель третьего порядка и его свойства
..Векторное умножение векторов базиса декартовой системы координат
.Ковариантные и контравариантные координаты вектора
..Индексная форма записи для выражений с определителями
..Свойства символов Веблена
..Операция векторного умножения в произвольных косоугольных координатах
.Линейный оператор и его матрица
.Доказательство теоремы об определителе
.Общие определения алгебраических операций с тензорами
.Примеры на применение тензоров в физике
..Задачи на тождественные преобразования
..Параллельное проектирование вектора в пространстве
Проекция точки на плоскость
Проецирование точки на плоскость производится способом аналогичным проецированию точки на прямую в плоскости. Проекцией точки A на плоскость α в направлении вектора называется точка пересечения плоскости и прямой, проведенной через эту точку в направлении проецирования (рис. 7, а).
а) 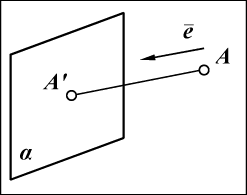 б)
б) 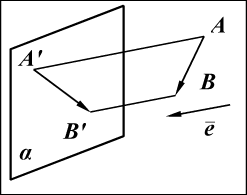 Рис. 7
Рис. 7
Проекция вектора на плоскость
Проекцией вектора на плоскость α называется вектор (рис. 7, б), где точки и являются проекциями точек и соответственно.
Проекция вектора на прямую
Спроектировать вектор на прямую в пространстве аналогично тому, как это можно сделать на плоскости, нельзя.
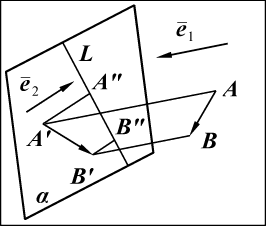
Рис. 8
Для начала спроектируем вектор по направлению на некоторую плоскость, проходящую через прямую L . На рис. 8 эта плоскость обозначена α . Затем, полученную таким образом проекцию , спроектируем по направлению (вектор лежит в плоскости α ) на прямую L . В результате получим вектор , который и принимают за проекцию вектора на прямую. Из построения очевидно, что проекция вектора не зависит от положения проецируемого вектора в пространстве. Проще говоря: равные векторы имеют и равные проекции. Если бы это было не так, мы не имели права говорить о проекции вектора вообще.
Вектор (проекция вектора на ось L ) можно получить и более простым способом. В самом деле, точка является точкой пересечения плоскости, проходящей через точки , и и прямой L . Плоскость же, проходящая через эти точки параллельна векторам и . Назовем плоскость параллельную направлениям проецирования и проецирующей плоскостью.
Следовательно, можно дать следующее определение проекции вектора на прямую в пространстве.
Проекцией вектора на прямую L по направлению проецирующей плоскости α называется вектор, . Точки и при этом являются точками пересечения прямой L и плоскостей, проведенных через точки и параллельно проецирующей плоскости.
Для обозначения проекции вектора на прямую будем использовать следующее обозначение: или .
Проекция вектора на прямую – величина векторная. Совершенно аналогично тому, что мы имели на плоскости, и для пространственного случая мы можем ввести понятие алгебраического значения проекции вектора на направленную ось. Для обозначения алгебраического значения проекции мы будем (так же как и в «плоском» случае) использовать то же самое обозначение, только без «векторной» черты сверху: или . И, что очень приятно, теорема (1), которую мы доказали для «плоского» случая, справедлива и для обеих проекций в пространстве:
Доказательство полностью аналогично тому, что мы привели для случая на плоскости.
..Ортогональная проекция вектора в пространстве
О ртогональная проекция есть частный случай параллельной проекции и, поэтому для нее справедливы те общие результаты, которые мы уже получили. В то же время ортогональная проекция обладает рядом геометрических свойств, которые выгодно отличают ее от других видов проекции. Физика также имеет свой собственный интерес к этому виду проекции. Например, работа силового поля зависит именно от ортогональной проекции силы на направление перемещения. Можно, видимо, утверждать, что ортогональная проекция и, связанная с ней, ортогональная система координат, о которой мы будем говорить в дальнейшем, выделена самой природой.
Ортогональная проекция вектора на плоскость
Ортогональную проекцию мы получим, если вектор, задающий направление проектирования, ортогонален плоскости, на которую производится проектирование. Поскольку при ортогональном проектировании направление проектирования задается однозначно самой плоскостью, то в условном обозначении его можно опустить: .
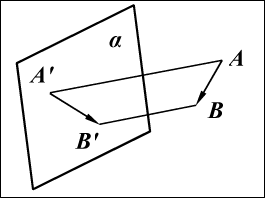
Рис. 9
Для получения ортогональной проекции вектора на плоскость достаточно из начала и конца вектора опустить на эту плоскость перпендикуляры. Основания этих перпендикуляров и определяют проекцию вектора на плоскость (рис. 9): .
Ортогональная проекция вектора на прямую и направленную ось
Для построения ортогональной проекции вектора на прямую или ось необходимо использовать проектирующую плоскость α ортогональную прямой, либо просто опустить на прямую перпендикуляры (, ) из начала и конца вектора (рис 10).
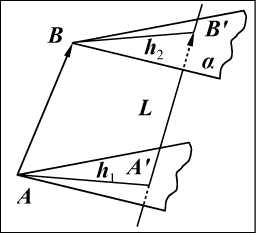
Рис. 10
В условных обозначениях это запишется так:
; и для алгебраической величины ортогональной проекции вектора на направленную ось – , где s – знак плюс или минус.
Теперь придется сказать несколько слов об употреблении термина «проекция». Мы уже ввели несколько понятий, каждое из которых претендует на это название: проекция вектора на плоскость, «векторная» проекция вектора на прямую, алгебраическое значение проекции вектора на направленную ось, ортогональная проекция вектора на плоскость, «векторная» ортогональная проекция вектора на прямую и алгебраическое значение ортогональной проекции вектора на направленную ось. Наиболее длинным и неудобным по названию и одновременно наиболее часто используемым является последнее понятие. В силу этого название «проекция» в векторной алгебре закрепилось именно за алгебраическим значением ортогональной проекции вектора на направленную ось. В дальнейшем мы также не будем отступать от этой традиции, тем более что из контекста обычно всегда ясно, о чем идет речь.
Итак, проекцией вектора на направленную ось будем называть алгебраическое значение его ортогональной проекции на эту ось.
Мы не будем считать это определением проекции вектора на направленную ось, а лишь удобным соглашением о названии.
Свойства ортогональной проекции вектора на направленную ось.
1. Проекция суммы векторов равна сумме их проекций.
Для двух векторов:
и для любого их количества
2. Проекция произведения вектора на действительное число λ равна произведению числа λ на проекцию вектора .
Если первые два свойства справедливы для всех типов проекций, и мы их сформулировали более для порядка, то следующее свойство является «визитной карточкой» ортогональной проекции.
3. Проекция вектора на направленную ось равна произведению его модуля на , где угол – угол между вектором и направленной осью (рис. 11). Дадим этому свойству доказательство.
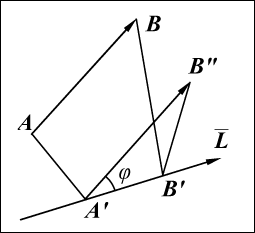
Рис. 11
Спроектируем точки и (конечно, ортогонально) на прямую . Вектор есть проекция вектора : . Перенесем вектор параллельно самому себе так, чтобы точка совпала с точкой . Минимальный угол между векторами и принимается за угол принимается за угол φ между вектором и осью. Поскольку равные векторы имеют и равные проекции, то проекции векторов и одинаковы и равны . Алгебраическая величина проекции вектора , или просто проекция, в соответствии с соглашением о названиях, равна , где s означает знак «плюс» или «минус». А модуль вектора , в свою очередь, равен произведению модуля вектора на :
1. Проекция вектора на ось
Геометрическая проекция вектора — это вектор, который можно получить, если провести перпендикуляры от концов вектора до выбранной оси. Проекция начала вектора соответствует началу геометрической проекции, а проекция конца вектора соответствует концу геометрической проекции.

Ваш браузер не поддерживает HTML5 видео
Для вектора v → геометрическая проекция на оси \(t\) — это вектор v t → .

Ваш браузер не поддерживает HTML5 видео
Для вектора n → геометрическая проекция на оси \(y\) — это вектор n y → .
Проекция вектора на ось — это скалярная величина (число), равная длине геометрической проекции вектора, если направление оси и геометрической проекции совпадают; или число, противоположное длине геометрической проекции вектора, если направления геометрической проекции и оси — противоположные.

a x = 4 b x = − 3
Если длина вектора a → равна a → и α — это острый угол, созданный вектором и осью \(x\), то скалярная проекция вектора вычисляется по формуле: a x = a → ⋅ cos α .
Знак проекции вектора выбирается в зависимости от направления оси.

На рисунке видно, что эту формулу можно получить из соотношения в прямоугольном треугольнике:
cos α = прилежащий катет гипотенуза = a x → a → .
Обрати внимание!
Если вектор и ось проекций параллельны, то скалярная проекция на этой оси — число, которое равно длине вектора, если направления вектора и оси совпадают, или число, противоположное длине вектора, если направления вектора и оси — противоположные.
проекция вектора на плоскость
Задача заключается в следующем:
Существует плоскость заданная тремя точками в пространстве O,A,B.
Также существует точка X в пространстве с заданными координатами.
Вопрос: как найти проекцию точки X на плоскость? и если это поможет то, также известна нормаль плоскости. И известен кватернион пересчёта положения плоскости
Готовые функции использовать не могу, пишу под контроллеры расчёт ориентации объекта.
Пытался что-то придумать с уравнениями плоскости, но так не чего дельного не придумал, при том, что точно уже есть готовые алгоритмы которые с успехом применяются в графике.
Также появилась идея пересчитать эту точку обратным кватернионом, при этом, спроецировать задача не сложная отняв высоту точки и пересчитать снова тем же кватернионом обратно, но на это уйдет неимоверное количество ресурсов. Поэтому я отмёл идею на стадии обдумывания.
Уважаю ваш форум и заранее говорю СПАСИБО!
#1
21:04, 11 сен 2012
powerbrain
> проекция вектора на плоскость
> Тема, как мне кажется, уже не новая, но всё-же.
Да уж, лет эдак тысячи две с половиной 🙂
normal = normalize(cross(A-O, B-O));
projection = projection — normal * dot(normal, projection);
- powerbrain
- Пользователь
#2
11:54, 12 сен 2012
normal = normalize( cross( A-O, B-O)); //нормаль у меня уже есть projection = projection - normal * dot( normal, projection);
Вопрос: Откуда я возьму projection? если изначально у меня его нет.
#3
12:51, 12 сен 2012
vec3 N = cross(OA, OB) — получили нормаль к плоскости.
Знаем, что уравнение плоскости имеет вид A*x + B*y + C*z + D = 0
A, B, C — Это как раз компоненты нормали. Т.е. N = .
Находим D, подставляя в уравнение координаты точки, принадлежащей плоскости, например точки О:
D = -(A*O.x + B*O.y + C*O.z)
Теперь ищем проекцию точки Х, назовем Р. Эта точка лежит в плоскости, т.е. должно выполнятся равенство A*Р.x + B*Р.y + C*Р.z + D = 0, с другой стороны, эта точка лежит на прямой, которая образуется точкой Х и выпущенным из неё вектором нормали N(по определению проекции), т.е. P = X + K*N, где К — некоторый коэффициент. Подставляем это в уравнение прямой:
A*(X.x + K*N.x) + B*(X.y + K*N.y) + C*(X.z + K*N.z) + D = 0
A*X.x + B*X.y + C*X.z + K*(A*N.x + B*N.y + C*N.z) + D = 0
Не забываем, что N = :
dot(N, X) + K*dot(N, N) + D = 0
K = -(dot(N, X) + D)/dot(N, N)
И раз нашли K, то находим точку проекции Р:
P = X + K*N
P.S. cross — векторное произведение векторов, dot — скалярное произведение.
P.P.S. Если вектор нормали к плоскости вдруг уже есть и нормализован, то dot(N, N) = 1 и тогда получается K = -dot(N, X) — D
- powerbrain
- Пользователь
#4
15:44, 13 сен 2012
alorken спасибо! Всё что хотел заработало!